V dokonalé optické soustavy v klasické teorii optiky, paprsky světla řízení z libovolného objektu bod sjednotit v obrázku bod, a proto prostor objektů je uveden v prostoru obrazu. Zavedení jednoduchých pomocných termínů, kvůli Gaussovi, pojmenované ohniskové vzdálenosti a ohniskové roviny, umožňuje určení obrazu jakéhokoli objektu pro jakýkoli systém. Gaussova teorie, nicméně, je pravda jen tak dlouho, jak úhlů provedené všechny paprsky s optickou osou (osy souměrnosti systému) jsou nekonečně malé, tj. s nekonečně malé objekty, obrázky a čočky; v praxi tyto podmínky nesmí být realizovány, a obrazy promítané pomocí neopravené systémy jsou obecně špatně definované a často rozmazané, pokud clonu nebo zorné pole přesahuje určité meze.
vyšetřování Jamese Clerka Maxwella a Ernsta Abbeho ukázalo, že vlastnosti těchto reprodukcí, tj. relativní polohu a velikost obrázků, nejsou speciální vlastnosti optické systémy, ale nezbytné důsledky předpoklad (za Abbe) reprodukce všech bodů prostoru v obrazových bodů, a jsou nezávislé na způsobu rozmnožování se uskutečňuje. Tito autoři však ukázali, že žádný optický systém nemůže tyto předpoklady ospravedlnit, protože jsou v rozporu se základními zákony reflexe a lomu. Tudíž, Gaussova teorie poskytuje pouze vhodnou metodu aproximace reality; realistické optické systémy nedosahují tohoto nedosažitelného ideálu. V současné době, vše, co lze dosáhnout, je projekce jedné roviny na jinou rovinu; ale i v tom, vždy dochází k aberacím a může být nepravděpodobné, že budou někdy zcela opraveny.
Aberace axiální bodů (sférické aberace v omezeném smyslu)Editovat

Nechť S (obr. 1) být jakýkoli optický systém, paprsky vycházející z bodu osy O pod úhlem u1 se spojí v bodě osy o ‚ 1; a ty pod úhlem u2 v bodě osy o ‚ 2. Pokud dojde k lomu na kolektivním sférickém povrchu nebo tenkou pozitivní čočkou, O’2 bude ležet před O‘ 1, pokud je úhel u2 větší než U1 (pod korekcí); a naopak s disperzním povrchem nebo čočkami(nad korekcí). Žíravina se v prvním případě podobá znaménku > (větší než); ve druhém < (méně než). Pokud je úhel u1 velmi malý, O ‚1 je Gaussův obraz; a O ‚1 O‘ 2 se nazývá podélná aberace a O ‚ 1R boční aberace tužek s clonou u2. Pokud tužka s úhlem u2 je, že maximální odchylka všech tužky přenáší, pak v rovině kolmé k ose O’1 je kruhový disk o záměně poloměr O’1R, a v rovnoběžné rovině v O’2 další z okruhu O’2R2; mezi těmito dvěma se nachází na disku nejméně zmatek.
největší otevření tužky, které se podílejí na reprodukci O, tj. úhel u, je obecně stanovena v rozpětí jedné z čočky nebo u díry v tenké desky umístěné mezi, před, nebo za objektivy systému. Tento otvor se nazývá doraz nebo membrána; Abbe použil termín aperture stop pro otvor i mezní okraj čočky. Složka S1 systému, nachází se mezi clonu zastavit a objekt O, projekty, obrázek, bránice, nazval Abbé vstupní pupily; výstupní pupila je obraz tvořen komponenty S2, který je umístěn za clonu zastavit. Všechny paprsky, které vydávají z O a procházejí clonou, také procházejí vstupními a výstupními žáky, protože se jedná o obrazy clony. Od maximální clony na tužky vydání z O je úhel, u protilehlý vchod žák v tomto bodě, velikost aberace bude určeno podle polohy a průměru vstupní pupily. Pokud je systém zcela za dorazem clony, pak je to sám vstupní žák (přední doraz); pokud je zcela vpředu, je to výstupní žák (zadní doraz).
Pokud objekt bod být nekonečně vzdálené, všechny paprsky přijat první člen systému jsou rovnoběžné, a jejich křižovatek, po křížení systém, se liší podle jejich kolmá výška incidence, tj. jejich vzdálenost od osy. Tato vzdálenost nahrazuje úhel u v předchozích úvahách; a clona, tj. poloměr vstupní zornice, je jeho maximální hodnota.
aberace prvků, tj. nejmenších objektů v pravém úhlu k ose
pokud paprsky vycházejí z O (obr. 1) jsou souběžné, nevyplývá z toho, že body v části roviny kolmé na o k ose budou také souběžné, i když část roviny bude velmi malá. Se zvyšující se clonou) bude reprodukován sousední bod N, ale zúčastní se aberací srovnatelných velikostí s ON. Těmto aberacím se zabrání, pokud podle Abbe platí sinusová podmínka sin u’1/sin u1=sin u’2/sin u2 pro všechny paprsky reprodukující bod o. Pokud je objektový bod o nekonečně vzdálený, u1 a u2 mají být nahrazeny H1 a h2, kolmé výšky dopadu; sinusová podmínka se pak stává sin u ‚1/h1=sin u’2 / h2. Systém splňuje tuto podmínku a bez sférické aberace se nazývají aplanatické (řeckého a-, privativní, chcete, putování). Toto slovo poprvé použil Robert Blair k charakterizaci nadřazeného achromatismu, a, následně, mnoha spisovateli také označovat svobodu od sférické aberace.
Od aberací se zvyšuje s vzdálenost paprsku od středu objektivu, aberace se zvyšuje, jak se zvyšuje průměr objektivu (nebo odpovídajícím způsobem, s průměrem otvoru), a proto mohou být minimalizovány snížením clony, v ceně také snížení množství světla dopadajícího na obrazové rovině.
Aberace boční objekt bodů (body nad osou) s úzkými tužky — astigmatismEdit

bod O (obr. 2) v konečné vzdálenosti od osy (nebo s nekonečně vzdálený objekt, bod, který je protilehlý konečný úhel v systému) je, obecně, dokonce ani tehdy ne ostře reprodukovat, pokud tužkou paprsky vycházející z a křížení systému je nekonečně úzký snížením clony zastavit; tato tužka se skládá z paprsků, které mohou projít od objektu prostřednictvím nyní nekonečně malé vstupní pupily. Je vidět (ignoruje výjimečné případy), že tužka nesplňuje refrakční nebo odraznou plochu v pravém úhlu; proto je astigmatická (Gr. a -, privative, stigmia, a point). Pojmenování centrální paprsek procházející vstupní pupily osa tužkou nebo hlavní ray, to může být řekl: paprsky tužka protínají, ne v jednom bodě, ale ve dvou fokálních linií, které lze předpokládat, že je v pravém úhlu k hlavní ray; z těchto, jeden leží v rovině obsahující hlavní paprsek a osa systému, tj. v první hlavní části, nebo meridionální části, a druhé v pravém úhlu, tj. v druhé hlavní části, nebo sagitální řez. Dostáváme proto v žádné jednotlivé zakročující letadlo za systém, jako, například, se zaměřením obrazovky, obraz objektu bod, na druhé straně, v každé ze dvou rovin, čar O a O“ jsou samostatně tvořil (v sousední roviny elipsy jsou tvořeny), a v rovině mezi O‘ a O“ kruhu přinejmenším zmatek. Interval O ‚O“, nazývá astigmatický rozdíl, zvyšuje, obecně, s úhlem W vyroben hlavní ray OP s osou systému, tj. s zorné pole. Dvě astigmatické obrazové plochy odpovídají jedné rovině objektu; a ty jsou v kontaktu v bodě osy; na jedné leží ohniskové čáry prvního druhu, na druhé straně ty druhé. Systémy, ve kterých se oba astigmatické povrchy shodují, se nazývají anastigmatické nebo stigmatické.
Sir Isaac Newton byl pravděpodobně objevitelem astigmatizace; pozici astigmatických obrazových linií určil Thomas Young; a teorii vyvinul Allvar Gullstrand. Bibliografie P.Culmanna je uvedena v Die Bilderzeugung Moritze von Rohra v optischen Instrumenten.
Aberace boční objekt bodů s širokými tužky — comaEdit
Po otevření stop širší, podobné odchylky vznikají pro boční bodů, jak již bylo diskutováno, pro axiální body, ale v tomto případě jsou mnohem složitější. Průběh paprsků v meridionální část je již symetrický hlavní ray tužky; a na zakročující letadlo tam objeví, místo světelného bodu, opravu světla, není symetrická kolem bodu, a často vykazují podobnost se kometa s ocasem směřovat směrem k nebo pryč od osy. Z tohoto vzhledu má své jméno. Nesymetrická forma meridionální tužky—dříve jediná zvažovaná-je kóma pouze v užším smyslu; další chyby v kómatu ošetřili Arthur König a Moritz von Rohr a později Allvar Gullstrand.
Zakřivení pole imageEdit
Pokud výše uvedené chyby je nutno odstranit, dvě astigmatické plochy spojené, a ostrý obraz získaný s široký otvor—tam zůstává nutnost správné zakřivení povrchu obrazu, zvláště když je obraz má být přijat na rovný povrch, např. ve fotografii. Ve většině případů je povrch konkávní směrem k systému.
zkreslení obrazueditovat

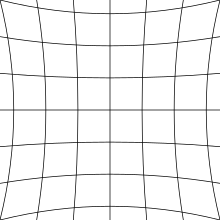
i když je obraz ostrý, může být zkreslený ve srovnání s ideální projekcí dírky. V dírkové projekci je zvětšení objektu nepřímo úměrné jeho vzdálenosti od kamery podél optické osy, takže kamera směřující přímo na rovný povrch reprodukuje tento plochý povrch. Zkreslení lze považovat za nerovnoměrné roztahování obrazu nebo rovnocenně za změnu zvětšení v poli. Zatímco „narušení“ může obsahovat libovolné deformace obrazu, nejvýraznější druhy zkreslení produkované konvenční zobrazovací optika je „soudkovité zkreslení“, v němž střed snímku se zvětší více, než je obvod (obrázek 3a). Zadní strana, ve které je obvod zvětšen více než střed, je známá jako „zkreslení pincushionu“ (obrázek 3b). Tento efekt se nazývá zkreslení objektivu nebo zkreslení obrazu a existují algoritmy, které jej opravují.
systémy bez zkreslení se nazývají ortoskopické (orthos, right, skopein to look) nebo přímočaré (přímé čáry).

Tato aberace je docela odlišný od toho ostrost reprodukce, v unsharp, rozmnožování, otázky zkreslení vzniká, pokud je pouze částí objektu může být uznána na obrázku. Pokud v neostrosti obrazu, opravu světla odpovídá objektu bod, těžiště náplast může být považována za obraz bodu, což je bod, kde se letadlo příjem obrazu, např. se zaměřením obrazovky, protíná paprsek procházející středem stop. Tento předpoklad je oprávněný, pokud špatný obraz na zaostřovací obrazovce zůstává při zmenšení clony stacionární; v praxi k tomu obvykle dochází. Tento paprsek, pojmenovaný podle Abbé hlavní ray (nesmí být zaměňována s hlavní paprsky Gaussova teorie), prochází středem vstupní pupily před prvním lomu, a střed výstupní pupily po posledním lomu. Z toho vyplývá, že správnost kresby závisí pouze na hlavních paprscích; a je nezávislý na ostrosti nebo zakřivení obrazového pole. S odkazem na obr. 4, Máme O ‚Q‘ / OQ = a ‚tan w‘ / a tan w = 1 / N, kde N je měřítko nebo zvětšení obrazu. Aby bylo N konstantní pro všechny hodnoty w, musí být „tan w“ /a tan w také konstantní. Je-li poměr a’/a dostatečně konstantní, jak je tomu často, výše uvedený vztah se snižuje na stav Airy, tj. tan w’/ tan w= konstanta. Tento jednoduchý vztah (viz Camb. Phile. Trans., 1830, 3, str. 1) je splněna ve všech systémech, které jsou symetrické s ohledem na jejich membrána (stručně jménem symetrické nebo holosymmetrical cíle), nebo které se skládají ze dvou, ale různé velikosti, komponenty, umístěné z bránice v poměru jejich velikost, a představuje stejné zakřivení (hemisymmetrical cílů); v těchto systémech tan w‘ / tan w = 1.
stálost a ‚ / a nezbytná pro tento vztah k držení byla zdůrazněna R. H. Bow (Brit. Novinář. Foto., 1861), a Thomas Sutton (Photographic Notes, 1862); byl ošetřen o. Lummerem A M. von Rohr (Zeit. f. Instrumentenk., 1897, 17 a 1898, 18, s. 4). Vyžaduje, aby střed dorazu clony byl reprodukován ve středech vstupních a výstupních žáků bez sférické aberace. M. von Rohr ukázal, že pro systémy, které splňují ani příjemné, ani Luk-Sutton stav, poměr, protože w’/tan w bude konstantní pro jednu vzdálenost objektu. To v kombinaci podmínka je přesně splněna holosymmetrical cíle reprodukci s měřítkem 1, a hemisymmetrical, pokud se rozsah reprodukce rovná poměru velikostí obou složek.
Zernikovy model aberrationsEdit
Kruhové wavefront profily spojené s aberace mohou být matematicky modelovány pomocí Zernikovy polynomy. Vyvinutý Frits Zernike v 1930, Zernike polynomy jsou ortogonální přes kruh poloměru jednotky. Komplexní, abnormální wavefront profil může být křivka-vybavena Zernikovy polynomy výnos sada kování koeficienty, které jednotlivě představují různé typy aberací. Tyto Zernikovy koeficienty jsou lineárně nezávislé, tedy jednotlivé aberace příspěvky k celkovému vlnoplochy mohou být izolovány a kvantifikovány samostatně.
existují sudé a liché Zernike polynomy. I Zernikovy polynomy jsou definovány jako
Z n m ( ρ , ϕ ) = R n m ( ρ ) cos ( m ϕ ) {\displaystyle Z_{n}^{m}(\rho ,\phi )=R_{n}^{m}(\rho )\,\cos(m\,\phi )\!}

a liché Zernikovy polynomy jako
Z n − m ( ρ , ϕ ) = R n m ( ρ ) sin ( m ϕ ) , {\displaystyle Z_{n}^{-m}(\rho ,\phi )=R_{n}^{m}(\rho )\,\sin(m\,\phi ),\!}

, kde m a n jsou nezáporné celá čísla, n ≥ m {\displaystyle n\geq m}

, Φ je azimutální úhel v radiánech, a ρ je normalizované radiální vzdálenost. Radiální polynomy R n m {\displaystyle R_{n}^{m}}

ne azimutální závislost, a jsou definovány jako R n m ( ρ ) = ∑ k = 0 ( n − m ) / 2 ( − 1 ) k ( n − k ) ! k ! ((n + m) / 2-k)! ((n-m) / 2-k)! ρ n-2 K pokud je n-m sudý {\displaystyle R_{n}^{m} (\rho )=\!\sum _{k=0}^{(n-m) / 2}\!\!\!{\frac {(-1)^{k}\, (n-k)!{k!\, ((n + m) / 2-k)!\, (n-m) / 2-k)!}}\;\rho ^{n-2\,k}\quad {\mbox{pokud }}n-m{\mbox{ i}}}

a R n m ( ρ ) = 0 {\displaystyle R_{n}^{m}(\rho )=0}

pokud n − m {\displaystyle n-m}

, je lichá.
prvních několik Zernike polynomů, vynásobených jejich příslušnými koeficienty, jsou:
0 × 1 {\displaystyle a_{0}\times 1}
 |
„Píst“, rovná se střední hodnota wavefront |
1 × ρ cos ( ϕ ) {\displaystyle a_{1}\times \rho \cos(\phi )}
 |
„X-Tilt“, odchylka celkové paprsek v sagitální směru |
2 × ρ sin ( ϕ ) {\displaystyle a_{2}\times \rho \sin(\phi )}
 |
„Y-Tilt“, odchylka celková šířka v tangenciálním směru |
3 × ( 2 ρ 2 − 1 ) {\displaystyle a_{3}\times (2\rho ^{2}-1)}
 |
„Rozostření“, parabolické wavefront vyplývající z toho, že se zaměření |
4 × ρ 2 cos ( 2 ϕ ) {\displaystyle a_{4}\times \rho ^{2}\cos(2\phi )}
 |
„0° Astigmatismus“, válcového tvaru po ose X nebo Y |
5 × ρ 2 sin ( 2 ϕ ) {\displaystyle a_{5}\times \rho ^{2}\sin(2\phi )}
 |
„45° Astigmatismus“, válcovitý tvar se zaměřením na ±45° od osy X |
6 × ( 3 ρ 2 − 2 ) ρ cos ( ϕ ) {\displaystyle a_{6}\times (3\rho ^{2}-2)\rho \cos(\phi )}
 |
„X-Koma“, comatic obraz planoucí v horizontálním směru |
7 × ( 3 ρ 2 − 2 ) ρ sin ( ϕ ) {\displaystyle a_{7}\times (3\rho ^{2}-2)\rho \sin(\phi )}
 |
„Y-Koma“, comatic obraz spalování ve vertikálním směru |
8 × ( 6 ρ 4 − 6 ρ 2 + 1 ) {\displaystyle a_{8}\times (6\rho ^{4}-6\rho ^{2}+1)}
 |
„Třetí pořadí sférické aberace“ |
kde ρ {\displaystyle \rho }

je normalizované žák okruhu s 0 ≤ ρ ≤ 1 {\displaystyle 0\leq \rho \leq 1}

, ϕ {\displaystyle \phi }

je azimutální úhel kolem žáka s 0 ≤ ϕ ≤ 2 π {\displaystyle 0\leq \phi \leq 2\pi }

, a montáž koeficientů a 0 , … , 8 {\displaystyle a_{0},\ldots ,a_{8}}

jsou vlnoplochy chyby ve vlnových délkách.
Jako Fourierova syntéza pomocí sines a cosines, wavefront může být dokonale zastoupeny dostatečně velký počet vyšší-aby Zernikovy polynomy. Nicméně, resp. s velmi strmé přechody nebo velmi vysoké prostorové frekvence struktury, jako je produkován šíření prostřednictvím atmosférické turbulence nebo aerodynamické flowfields, nejsou dobře modelovány Zernikovy polynomy, které mají tendenci, aby se low-pass filtr jemné prostorové rozlišení v vlnoplochy. V tomto případě mohou jiné metody montáže, jako jsou fraktály nebo rozklad singulární hodnoty, přinést lepší výsledky montáže.
okruh polynomů byly zavedeny pomocí Frit Zernikovy k vyhodnocení bodu obraz abnormální, optický systém s ohledem na účinky difrakce. Dokonalý bodový obraz za přítomnosti difrakce popsal Airy již v roce 1835. Trvalo téměř sto let, aby se dospělo na komplexní teorie a modelování bod obrazu abnormální systémy (Zernikovy a Nijboer). Analýza Nijboer a Zernike popisuje rozložení intenzity v blízkosti optimální ohniskové roviny. Rozšířená teorie, která umožňuje výpočet bodu obrázku amplituda a intenzita na mnohem větším objemu v ohniskové oblasti byla v poslední době vyvinuta (Extended Nijboer-Zernikovy teorie). Tato Rozšířená Nijboer-Zernikovy teorie bodu obrazu nebo point-spread function‘ formace má našly uplatnění v obecné výzkumu na vytváření obrazu, zejména pro systémy s vysokou numerickou aperturou, a v různých optických systémů s ohledem na jejich aberace.