täydellisessä optisessa järjestelmässä klassisen Optiikan teoriassa mistä tahansa kohteesta lähtevät valonsäteet yhtyvät kuvapisteeksi, ja näin ollen objektiavaruus toistuu kuva-avaruudessa. Gaussin ansiosta käyttöön otetut yksinkertaiset aputermit, joita kutsutaan polttoväleiksi ja polttotasoiksi, mahdollistavat minkä tahansa kohteen kuvan määrittämisen mille tahansa järjestelmälle. Gaussin teoria on kuitenkin totta vain niin kauan kuin kaikkien säteiden optisella akselilla (systeemin symmetrisellä akselilla) tekemät kulmat ovat äärettömän pieniä eli äärettömän pieniä kohteita, kuvia ja linssejä; käytännössä nämä ehdot eivät välttämättä toteudu, ja korjaamattomien systeemien projisoimat kuvat ovat yleensä huonosti määriteltyjä ja usein hämäriä, jos aukko tai näkökenttä ylittää tietyt rajat.
James Clerk Maxwellin ja Ernst Abben tutkimukset osoittivat, että näiden jäljennösten ominaisuudet, ts. kuvien suhteellinen sijainti ja suuruus eivät ole optisten järjestelmien erityisiä ominaisuuksia, vaan tarpeellisia seurauksia oletuksesta (per Abbe), joka koskee tilan kaikkien pisteiden toistoa kuvapisteissä, ja ovat riippumattomia tavasta, jolla kopiointi tapahtuu. Nämä kirjoittajat osoittivat kuitenkin, että mikään optinen järjestelmä ei voi oikeuttaa näitä olettamuksia, koska ne ovat ristiriidassa perustavanlaatuisia heijastus-ja taittumislakeja vastaan. Näin ollen Gaussin teoria tarjoaa vain kätevän menetelmän todellisuuden lähentämiseksi; realistiset optiset järjestelmät eivät yllä tähän saavuttamattomaan ihanteeseen. Tällä hetkellä voidaan saada aikaan vain yhden tason projektio toiselle tasolle, mutta tässäkin tapahtuu aina poikkeamia, ja saattaa olla epätodennäköistä, että niitä koskaan täysin korjattaisiin.
aksiaalipisteiden Aberraatio (pallopoikkeama rajoitetussa merkityksessä) Edit

Anna S (kuva. 1) olla mikä tahansa optinen järjestelmä, säteet etenevät akselin pisteen o alle kulma u1 yhdistää akselin pisteen O ’ 1; ja ne, jotka ovat kulman u2 alla akselin pisteessä O ’ 2. Jos kollektiivisella pallopinnalla tai ohuen positiivisen linssin läpi tapahtuu taittumista, O’2 on O’ 1: n edessä niin kauan kuin kulma u2 on suurempi kuin u1 (korjattavana) ja kääntäen dispersiivisellä pinnalla tai linsseillä (yli-korjattavana). Kaustinen muistuttaa ensimmäisessä tapauksessa merkkiä > (suurempi kuin), toisessa < (pienempi kuin). Jos kulma u1 on hyvin pieni, O ’1 on Gaussin kuva; ja O ’1 O’ 2 kutsutaan Pitkittäinen aberraatio, ja O ’ 1R sivusuunnassa aberraatio kynät aukko u2. Jos lyijykynä kulma u2 on, että suurin aberraatio kaikki lyijykynät lähetetään, sitten tasossa kohtisuorassa akselin o ’1 on pyöreä levy sekaannusta säde O’1R, ja rinnakkaistason o’ 2 toinen säde O ’ 2R2; näiden kahden sijaitsee levyn vähiten sekaannusta.
O-kirjaimen toistoon osallistuvien lyijykynien suurin aukko eli kulma u määräytyy yleensä jonkin Objektiivin marginaalin tai ohuen levyn reiän perusteella, joka on sijoitettu linssien väliin, ennen tai taakse. Tätä reikää kutsutaan pysäytykseksi tai kalvoksi; Abbe käytti termiä aukkopysäytys sekä linssin reiästä että rajamarginaalista. Järjestelmän komponentti S1, joka sijaitsee aukkopysäytyksen ja kohteen O välissä, projisoi kalvosta kuvan, jota Abbe kutsuu sisäänmeno-oppilaaksi; poistumisoppilas on komponentin S2 muodostama kuva, joka on sijoitettu aukkopysäytyksen taakse. Kaikki säteet, jotka lähtevät O: sta ja kulkevat aukon pysäkin läpi, kulkevat myös sisään-ja uloskäyntioppaiden läpi, koska nämä ovat kuvia aukon pysäkistä. Koska O: sta lähtevien lyijykynien suurin aukko on sisääntulo oppilaan tässä pisteessä osoittama kulma u, aberraation suuruus määräytyy sisäänkäynnin oppilaan sijainnin ja halkaisijan mukaan. Jos järjestelmä on kokonaan aukon stop, niin tämä on itse sisäänkäynnin oppilas (edessä stop); jos täysin edessä, se on exit oppilas (takana stop).
jos kohteen piste on äärettömän kaukana, kaikki systeemin ensimmäisen jäsenen vastaanottamat säteet ovat yhdensuuntaisia,ja niiden risteykset vaihtelevat systeemin läpikäynnin jälkeen sen mukaan, miten kohtisuorassa kohtauskorkeus on, eli niiden etäisyys akselista. Tämä etäisyys korvaa kulman u edeltävissä huomioissa, ja aukko eli sisääntuloaukon oppilaan säde on sen suurin arvo.
alkuaineiden Aberraatio, eli pienimmät suorassa kulmassa olevat kappaleet aksisedit
jos O: sta lähteviä säteitä (kuva. 1) ovat samanaikaisia, se ei seuraa, että pistettä osa suuntainen kohtisuorassa O akselin on myös samanaikaisia, vaikka osa suuntainen on hyvin pieni. Linssin halkaisijan kasvaessa (eli aukon kasvaessa) naapuripiste n toistuu, mutta siihen liittyy suuruudeltaan ON: iin verrattavia poikkeamia. Nämä poikkeamat vältetään, jos Abbe: n mukaan sinin ehto, sin u’1/sin u1=sin u’2/sin u2, pätee kaikkiin säteisiin, jotka toistavat pisteen O. Jos kohteen piste O on äärettömän kaukana, u1 ja u2 on korvattava H1: llä ja H2: lla, esiintyvyyden kohtisuorilla korkeuksilla; sinin ehdoksi tulee tällöin sin u ”1/h1=sin u” 2/h2. Järjestelmää, joka täyttää tämän ehdon ja jossa ei ole pallopoikkeamaa, kutsutaan aplanaattiseksi (Kreikan a -, privatiivi, plan, vaeltava). Tätä sanaa käytti ensin Robert Blair kuvaamaan ylivertaista akromatismia, ja myöhemmin monet kirjailijat ilmaisemaan vapautta myös pallopoikkeamasta.
koska aberraatio kasvaa sitä mukaa kuin säteen etäisyys linssin keskustasta kasvaa, aberraatio kasvaa linssin halkaisijan kasvaessa (tai vastaavasti aukon halkaisijan kasvaessa), ja näin ollen se voidaan minimoida pienentämällä aukkoa, jolloin myös kuvan tasoon pääsevän valon määrä vähenee.
sivukohtien (akselin ulkopuoliset pisteet) poikkeamat kapeilla kynillä — hajataittomuokkaa

piste O (kuva. 2) on rajallinen etäisyys akselilta (tai äärettömän kaukana objekti, kohta, joka subtends äärellinen kulma on järjestelmä) on, yleensä, silloinkin ei jyrkästi toistettu, jos lyijykynä säteet antavan siitä ja traversing järjestelmä on tehty äärettömän kapea vähentämällä aukon stop; tällainen lyijykynä koostuu säteet, jotka voivat kulkea objektin kohta kautta nyt äärettömän pieni sisäänkäynti oppilas. Nähdään (poikkeustapauksista piittaamatta), että kynä ei kohtaa taittuvaa tai heijastavaa pintaa suorassa kulmassa; siksi se on astigmaattinen (Gr. a -, privatiivi, stigmia, piste). Nimeämällä sisäänkäynnin oppilaan läpi kulkevan keskussäteen lyijykynän tai pääsäteen akseliksi voidaan sanoa: lyijykynän säteet eivät leikkaa toisiaan yhdessä pisteessä, vaan kahdessa polttoviivassa, joiden voidaan olettaa olevan suorassa kulmassa pääsäteeseen nähden; näistä yksi sijaitsee pääsäteen ja järjestelmän akselin sisältävässä tasossa, ts. ensimmäisessä pääjaksossa tai meridionaaliosassa ja toisessa suorassa kulmassa siihen nähden, eli toisessa pääjaksossa tai sagittaaliosassa. Saamme siis missään yksittäisessä pysäyttävän tason takana järjestelmä, kuten esimerkiksi tarkentava näyttö, kuva objektin kohta; toisaalta, kussakin kaksi planes linjat O’ ja O” ovat erikseen muodostettu (naapurimaiden tasoissa ellipsejä muodostetaan), ja tasossa välillä O’ ja O” ympyrän vähiten sekaannusta. Intervalli O ’O”, jota kutsutaan astigmaattiseksi eroksi, kasvaa yleensä pääsäteen op tekemän kulman W kanssa systeemin akselin eli näkökentän kanssa. Kaksi astigmaattista kuvapintaa vastaa yhtä objektitasoa, ja nämä ovat kosketuksissa akselin pisteessä; toisessa ovat ensimmäisen lajin polttoviivat, toisessa toisen. Järjestelmiä, joissa kaksi astigmaattista pintaa yhtyvät, kutsutaan anastigmaattisiksi tai stigmaattisiksi.
Sir Isaac Newton oli luultavasti astimationin löytäjä; astigmaattisten kuvajanojen sijainnin määritti Thomas Young, ja teorian kehitti Allvar Gullstrand. P. Culmannin bibliografia on Moritz von Rohrin teoksessa ”Die Bilderzeugung in optischen Instrumenten”.
sivukohtaisten kohtien Aberraatio leveäkynillä-comaEdit
avaamalla pysäkki leveämmäksi saadaan aikaan samanlaisia poikkeamia sivukohtien kohdalla kuin on jo keskusteltu aksiaalipisteiden kohdalla; mutta tässä tapauksessa ne ovat paljon monimutkaisempia. The course of the rays, meridional osa ei ole enää symmetrinen pääasiallisen ray, lyijykynä, ja pysäyttävä plane näyttää, sen sijaan, että valoisa kohta, patch valoa, ei symmetrinen noin kohta, ja usein näytteillä yhdennäköisyys komeetta ottaa sen häntä suunnattu kohti tai pois akselilta. Tästä ulkonäöstä se on saanut nimensä. Meridionaalisen lyijykynän epäsymmetrinen muoto—aiemmin ainoa pidetty-on kooma suppeammassa merkityksessä vain; muita koomavirheitä ovat hoitaneet Arthur König ja Moritz von Rohr sekä myöhemmin Allvar Gullstrand.
kuvakentän kaarevuus
jos edellä mainitut virheet poistetaan, kaksi astigmaattista pintaa yhtyvät ja saadaan terävä kuva laajalla aukolla—on edelleen tarpeen korjata kuvapinnan kaarevuus, varsinkin kun kuva on tarkoitus vastaanottaa tasopinnalla, esim.valokuvauksessa. Useimmiten pinta on kovera systeemiä kohti.
kuvan vääristymä

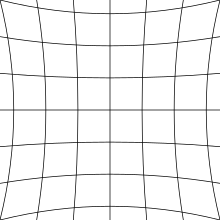
vaikka kuva olisi terävä, se voi olla vääristynyt verrattuna ihanteelliseen neulanreikäprojektioon. Neulanreikäprojektiossa kohteen suurennus on kääntäen verrannollinen sen etäisyyteen kameraan optista akselia pitkin niin, että suoraan tasaiselle pinnalle osoittava kamera toistaa tuon tasaisen pinnan. Vääristymän voidaan ajatella venyttävän kuvaa epäyhtenäisesti tai vastaavasti suurennuksen vaihteluna eri puolilla kenttää. Vaikka ” vääristymä ”voi sisältää kuvan mielivaltaisen muodonmuutoksen, tyypillisin perinteisen kuva-Optiikan tuottama vääristymä on” tynnyrivääristymä”, jossa kuvan keskusta suurennetaan kehää enemmän (kuva 3a). Käänteinen, jossa kehä suurenee enemmän kuin keskipiste, tunnetaan nimellä ”pincushion distortion” (kuva 3b). Tätä ilmiötä kutsutaan linssivääristymäksi tai kuvan vääristymäksi, ja sen korjaamiseksi on olemassa algoritmeja.
Vääristymättömiä järjestelmiä kutsutaan ortoskooppisiksi (orthos, right, skopein to look) tai suoraviivaisiksi (straight lines).

tämä aberraatio on aivan eri asia kuin Reproduktion terävyys; unsharpissa, reproduktiossa, syntyy vääristymäkysymys, jos kuviossa voidaan tunnistaa vain kappaleen osia. Jos epätarkassa kuvassa valopilkku vastaa esinepistettä, voidaan laastarin painopistettä pitää kuvapisteenä, jolloin kuvan vastaanottava taso, esimerkiksi tarkennusnäyttö, leikkaa pysäytyksen keskikohdan läpi kulkevan säteilyn. Tämä oletus on perusteltu, jos huono kuva tarkennusnäytöllä pysyy paikallaan aukon pienentyessä; käytännössä näin yleensä tapahtuu. Tämä säde, jonka Abbe on nimennyt pääasialliseksi säteeksi (ei pidä sekoittaa Gaussin teorian pääsäteisiin), kulkee sisäänmeno-oppilaan keskipisteen läpi ennen ensimmäistä taittumista ja uloskäynti-oppilaan keskipisteen läpi viimeisen taittumisen jälkeen. Tästä seuraa, että piirustuksen oikeellisuus riippuu yksinomaan pääsäteistä; ja se on riippumaton kuvakentän terävyydestä tai kaarevuudesta. Viitaten fig. 4, meillä on O ’ Q ’/oq = a ’tan w’ /a tan W = 1 / n, missä N on kuvan mittakaava tai suurennus. Jotta N olisi vakio kaikille w: n arvoille, myös ”tan w” /a tan w: n on oltava vakio. Jos suhde a ’/ A on riittävän vakio, kuten usein on, edellä mainittu suhde pienenee ilmavuuden tilaan eli tan w’/ tan w= A vakio. Tämä yksinkertainen suhde (katso Camb. Phil. Trans., 1830, 3, s. 1) täyttyy kaikissa järjestelmissä, jotka ovat symmetrisiä pallean suhteen (lyhyesti symmetriset tai holosymmetriset tavoitteet) tai jotka koostuvat kahdesta samankaltaisesta mutta erikokoisesta osasta, jotka on sijoitettu kalvosta niiden koon suhteessa ja joiden kaarevuus on sama (hemisymmetriset tavoitteet); näissä järjestelmissä tan w’ / tan w = 1.
A’/A: n pysyvyyden, joka on välttämätön tämän suhteen pitoon, osoitti R. H. Bow (Brit. Journ. Fotog., 1861), ja Thomas Sutton (Photographic Notes, 1862); sitä ovat käsitelleet O. Lummer ja M. von Rohr (Zeit. F. Instrumentenk., 1897, 17, ja 1898, 18, S. 4). Se edellyttää, että aukon keskikohta toistetaan sisään-ja uloskäyntioppaiden keskuksissa ilman pallopoikkeamaa. M. von Rohr osoitti, että järjestelmissä, jotka eivät täytä ilmavaa eivätkä keula-Sutton-ehtoa, suhde a’ cos w’/a tan w on vakio yhdellä etäisyydellä kohteesta. Tämä yhdistetty ehto täyttyy täsmälleen holosymmetrisillä tavoitteilla, jotka toistetaan asteikolla 1, ja hemisymmetrisillä tavoitteilla, jos toistoasteikon on oltava yhtä suuri kuin näiden kahden komponentin kokojen suhde.
aberrationseditin zerniken malli
aberraatioihin liittyvät ympyränmuotoiset aaltoprofiilit voidaan mallintaa matemaattisesti Zerniken polynomien avulla. Frits Zerniken 1930-luvulla kehittämä Zerniken polynomi on ortogonaalinen yli ympyrän, jonka yksikkösäde on. Monimutkainen, aberrated aaltorintaman profiili voidaan käyrä-varustettu Zernike polynomi tuottaa joukko sopiva kertoimia, jotka yksittäin edustavat erilaisia poikkeamia. Nämä Zernike-kertoimet ovat lineaarisesti riippumattomia, joten yksittäiset poikkeamat kokonaisaaltorintamalla voidaan eristää ja kvantifioida erikseen.
on olemassa parillisia ja parittomia Zerniken polynomeja. Parilliset zerniken polynomit määritellään seuraavasti:
Z N m ( ρ , ϕ ) = R n m ( ρ ) cos (m ϕ ) {\displaystyle Z_{n}^{m} (\Rho ,\phi )=R_{n}^{m} (\Rho )\,\cos (m\,\phi )\!}

ja pariton Zerniken polynomi
Z n – m ( ρ , ϕ ) = R n m ( ρ ) sin (m ϕ ) , {\displaystyle Z_{n}^{-m} (\Rho ,\phi )=R_{n}^{m} (\Rho )\,\sin (m\,\phi ),\!}

missä m ja n ovat nonnegatiivisia kokonaislukuja, joiden n ≥ m {\displaystyle n\geq m}

, Φ on atsimutaalikulma radiaaneina ja ρ on normalisoitu säteittäinen etäisyys. Radiaalipolynomeilla R n m {\displaystyle R_{n}^{m}}

ei ole atsimutaalista riippuvuutta, ja ne määritellään seuraavasti: R n m ( ρ ) = ∑ K = 0 ( n − m ) / 2 ( − 1 ) k ( n − k ) ! k ! (n + m ) / 2 − k ) ! (n − m / 2 − k)! ρ n − 2 k, jos n-m on parillinen {\displaystyle R_{n}^{m}(\rho )=\!\sum _{k=0}^{(n-m)/2}\!\!\!frac {(-1)^{k}\, (n-k)!k!\, ((n+m) / 2-k)!\, ((n-m) / 2-k)!}}\; \rho ^{n-2\, k}\quad {\mbox{if }}n-m{\mbox{ on parillinen}}}

ja R n m ( ρ) = 0 {\displaystyle R_{n}^{m} (\rho )=0}

jos n − m {\displaystyle n-m}

on pariton.
ensimmäiset Zerniken polynomit, jotka kerrotaan niiden sopivilla kertoimilla, ovat:
a 0 × 1 {\displaystyle a_{0}\times 1}
 |
”mäntä”, yhtä suuri kuin aaltorintaman keskiarvo |
a 1 × ρ cos (ϕ) {\displaystyle a_{1}\times \rho \cos (\phi )}
 |
”X-Tilt”, kokonaissäteen poikkeama sagittaalisessa suunnassa |
a 2 × ρ sin (ϕ) {\displaystyle a_{2}\times \rho \sin (\phi )}
 |
”y-kallistus”, kokonaissäteen poikkeama tangentiaalisessa suunnassa |
a 3 × (2 ρ 2 – 1) {\displaystyle a_{3}\times (2\rho ^{2}-1)}
 |
”Defocus”, parabolinen aaltorintama, joka johtuu epätarkasta olemisesta |
a 4 × ρ 2 cos (2 ϕ) {\displaystyle a_{4}\times \rho ^{2}\cos (2\phi )}
 |
”0° astigmatismi”, lieriömäinen muoto x – tai Y-akselilla |
5 × ρ 2 sin (2 ϕ) {\displaystyle a_{5}\times \Rho ^{2}\sin (2\phi )}
 |
”45° Hajataittoisuus”, lieriömäinen muoto, joka on suunnattu ±45° x-akselista |
a 6 × (3 ρ 2 − 2) ρ cos ( ϕ) {\displaystyle a_{6}\times (3\rho ^{2}-2)\rho \cos (\phi )}
 |
”X-Coma”, komaattinen kuva leimahtaa vaakatasossa |
a 7 × ( 3 ρ 2 − 2 ) ρ sin ( ϕ ) {\displaystyle a_{7}\times (3\Rho ^{2}-2)\Rho \sin (\phi )}
 |
”Y-Coma”, komaattinen kuva leimahtaa pystysuunnassa |
a 8 × (6 ρ 4-6 ρ 2 + 1) {\displaystyle a_{8}\times (6\Rho ^{4}-6\rho ^{2}+1)}
 |
”kolmannen kertaluvun pallopoikkeama” |
missä ρ {\displaystyle \rho }

on normalisoitu oppilaan säde 0 ≤ ρ ≤ 1 {\displaystyle 0\leq \rho \leq 1}

, ϕ {\displaystyle \phi }

on oppilaan ympärillä oleva atsimutaalikulma , jossa 0 ≤ ϕ ≤ 2 π {\displaystyle 0\leq \phi \leq 2\pi }

, ja sovituskertoimet a 0,…, a 8 {\displaystyle a_{0},\ldots, a_{8}}

ovat aaltorintaman virheitä aallonpituuksissa.
kuten Fourier ’ n synteesissä, jossa käytetään sinejä ja kosineja, aaltorintama voidaan täydellisesti esittää riittävän suurella määrällä korkeamman kertaluvun Zerniken polynomeja. Zerniken polynomit, joilla on taipumus alipäästösuodattimen hienoon spatiaaliseen määrittelyyn aaltorintamassa, eivät kuitenkaan ole hyvin mallinnettuja aaltorintamalla hyvin jyrkkiä jyrkkyyksiä tai erittäin suurta spatiaalista taajuusrakennetta, kuten ilmakehän turbulenssilla tai aerodynaamisilla virtauskentillä. Tällöin muut sovitusmenetelmät, kuten fraktaalit tai yksikköarvon hajoaminen, voivat tuottaa parempia sovitustuloksia.
ympyrän polynomin otti käyttöön Frits Zernike aberroidun optisen järjestelmän pistekuvan arvioimiseksi ottaen huomioon diffraktion vaikutukset. Täydellisen pistekuvan diffraktion läsnä ollessa Airy oli kuvannut jo vuonna 1835. Kesti lähes sata vuotta päästä kattava teoria ja mallinnus kohta kuva aberrated järjestelmien (Zernike ja Nijboer). Nijboerin ja Zerniken analyysi kuvaa intensiteettijakaumaa lähellä optimaalista polttotasoa. Äskettäin kehitettiin laajennettu teoria, joka mahdollistaa pistekuvan amplitudin ja voimakkuuden laskemisen paljon suuremmalla tilavuudella polttoalueella (laajennettu Nijboer-Zernike-teoria). Tämä laajennettu Nijboer-Zernike teoria kohta kuvan tai ”kohta-levitä funktio” muodostumista on löytänyt sovelluksia yleiseen tutkimukseen kuvan muodostumista, erityisesti järjestelmiä, joilla on suuri numeerinen aukko, ja luonnehtiminen optisten järjestelmien osalta niiden poikkeavuudet.