In un sistema ottico perfetto nella teoria classica dell’ottica, i raggi di luce che procedono da qualsiasi punto oggetto si uniscono in un punto immagine; e quindi lo spazio oggetto è riprodotto in uno spazio immagine. L’introduzione di semplici termini ausiliari, dovuti a Gauss, chiamati lunghezze focali e piani focali, consente la determinazione dell’immagine di qualsiasi oggetto per qualsiasi sistema. La teoria gaussiana, tuttavia, è vera solo finché gli angoli fatti da tutti i raggi con l’asse ottico (l’asse simmetrico del sistema) sono infinitamente piccoli, cioè con oggetti, immagini e lenti infinitesimali; in pratica queste condizioni potrebbero non essere realizzate e le immagini proiettate da sistemi non corretti sono, in generale, mal definite e spesso sfocate se l’apertura o il campo visivo superano determinati limiti.
Le indagini di James Clerk Maxwell e Ernst Abbe hanno dimostrato che le proprietà di queste riproduzioni, cioè la posizione relativa e la grandezza delle immagini, non sono proprietà speciali dei sistemi ottici, ma conseguenze necessarie della supposizione (per Abbe) della riproduzione di tutti i punti di uno spazio in punti immagine, e sono indipendenti dal modo in cui la riproduzione viene effettuata. Questi autori hanno dimostrato, tuttavia, che nessun sistema ottico può giustificare queste supposizioni, poiché sono contraddittorie con le leggi fondamentali della riflessione e della rifrazione. Di conseguenza, la teoria gaussiana fornisce solo un metodo conveniente per approssimare la realtà; i sistemi ottici realistici non sono all’altezza di questo ideale irraggiungibile. Attualmente, tutto ciò che può essere realizzato è la proiezione di un singolo piano su un altro piano; ma anche in questo, le aberrazioni si verificano sempre e può essere improbabile che queste saranno mai completamente corrette.
Aberrazione dei punti assiali (aberrazione sferica in senso limitato)Modifica

Sia S (fig. 1) sia qualsiasi sistema ottico, i raggi che procedono da un punto dell’asse O sotto un angolo u1 si uniranno nel punto dell’asse O ‘ 1; e quelli sotto un angolo u2 nel punto dell’asse O ‘ 2. Se c’è rifrazione su una superficie sferica collettiva, o attraverso una sottile lente positiva, O’2 si troverà di fronte a O’1 finché l’angolo u2 è maggiore di u1 (sotto correzione); e viceversa con una superficie dispersiva o lenti (sopra correzione). Il caustico, nel primo caso, assomiglia al segno > (maggiore di); nel secondo < (minore di). Se l’angolo u1 è molto piccolo, O ‘1 è l’immagine gaussiana; e O’1 O’2 è definita l’aberrazione longitudinale, e O’ 1R l’aberrazione laterale delle matite con apertura u2. Se la matita con l’angolo u2 è quella della massima aberrazione di tutte le matite trasmesse, allora in un piano perpendicolare all’asse a O’1 c’è un disco circolare di confusione di raggio O’1R, e in un piano parallelo a O’2 un altro di raggio O’2R2; tra questi due è situato il disco di minima confusione.
L’apertura più grande delle matite, che partecipano alla riproduzione di O, cioè l’angolo u, è generalmente determinata dal margine di una delle lenti o da un foro in una lastra sottile posta tra, prima o dietro le lenti del sistema. Questo foro è chiamato stop o diaframma; Abbe ha usato il termine stop di apertura sia per il foro che per il margine limite dell’obiettivo. Il componente S1 del sistema, situato tra l’arresto dell’apertura e l’oggetto O, proietta un’immagine del diaframma, definita da Abbe la pupilla d’ingresso; la pupilla d’uscita è l’immagine formata dal componente S2, che si trova dietro l’arresto dell’apertura. Tutti i raggi che emettono da O e passano attraverso l’arresto dell’apertura passano anche attraverso le pupille di entrata e di uscita, poiché queste sono immagini dell’arresto dell’apertura. Poiché l’apertura massima delle matite che emettono da O è l’angolo u sotteso dalla pupilla d’ingresso a questo punto, la grandezza dell’aberrazione sarà determinata dalla posizione e dal diametro della pupilla d’ingresso. Se il sistema è interamente dietro l’arresto dell’apertura, allora questo è esso stesso la pupilla di ingresso (arresto anteriore); se interamente davanti, è la pupilla di uscita (arresto posteriore).
Se il punto oggetto è infinitamente distante, tutti i raggi ricevuti dal primo membro del sistema sono paralleli e le loro intersezioni, dopo aver attraversato il sistema, variano in base alla loro altezza di incidenza perpendicolare, cioè alla loro distanza dall’asse. Questa distanza sostituisce l’angolo u nelle considerazioni precedenti; e l’apertura, cioè il raggio della pupilla d’ingresso, è il suo valore massimo.
Aberrazione di elementi, cioè oggetti più piccoli ad angolo retto rispetto all’assomodifica
Se i raggi emettono da O (fig. 1) sono simultanei, non segue che i punti in una porzione di un piano perpendicolare a O all’asse saranno anche simultanei, anche se la parte del piano sarà molto piccola. All’aumentare del diametro della lente (cioè, con l’aumentare dell’apertura), verrà riprodotto il punto N vicino, ma frequentato da aberrazioni comparabili in grandezza a ON. Queste aberrazioni sono evitate se, secondo Abbe, la condizione seno, sin u’1/sin u1=sin u’2/sin u2, vale per tutti i raggi che riproducono il punto O. Se il punto oggetto O è infinitamente distante, u1 e u2 devono essere sostituiti da h1 e h2, le altezze perpendicolari di incidenza; la condizione seno diventa quindi sin u’1/h1=sin u’2/h2. Un sistema che soddisfa questa condizione e privo di aberrazione sferica è chiamato aplanatico (greco a-, privativo, plann, a vagante). Questa parola fu usata per la prima volta da Robert Blair per caratterizzare un acromatismo superiore e, successivamente, da molti scrittori per indicare anche la libertà dall’aberrazione sferica.
Poiché l’aberrazione aumenta con la distanza del raggio dal centro dell’obiettivo, l’aberrazione aumenta con l’aumentare del diametro dell’obiettivo (o, corrispondentemente, con il diametro dell’apertura), e quindi può essere minimizzata riducendo l’apertura, al costo di ridurre anche la quantità di luce che raggiunge il piano dell’immagine.
Aberrazione dei punti dell’oggetto laterale (punti oltre l’asse) con matite strette — astigmatismEdit

Un punto O (fig. 2) finita la distanza dall’asse (o con un infinitamente oggetto lontano, un punto che sottende finita angolo al sistema) è, in generale, anche allora non accuratamente riprodotti, se il fascio di raggi uscenti da esso e attraversando il sistema è fatto infinitamente strette, riducendo l’apertura di stop; una matita si compone di raggi che può passare da puntare l’oggetto attraverso l’ormai infinitamente piccola pupilla d’entrata. Si vede (ignorando casi eccezionali) che la matita non incontra la superficie rifrangente o riflettente ad angolo retto; quindi è astigmatica (Gr. a -, privativo, stigmia, un punto). Nominando il raggio centrale che attraversa la pupilla d’ingresso l’asse della matita o raggio principale, si può dire: i raggi della matita si intersecano, non in un punto, ma in due linee focali, che si possono presumere essere ad angolo retto rispetto al raggio principale; di questi, uno si trova nel piano contenente il raggio principale e l’asse del sistema, cioè nella prima sezione principale o sezione meridionale, e l’altro ad angolo retto ad esso, cioè nella seconda sezione principale o sezione sagittale. Riceviamo, quindi, in nessun singolo piano di intercettazione dietro il sistema, come, ad esempio, uno schermo di messa a fuoco, un’immagine del punto dell’oggetto; d’altra parte, in ciascuno dei due piani le linee O’ e O” sono formate separatamente (nei piani vicini si formano ellissi), e in un piano tra O’ e O” un cerchio di minima confusione. L’intervallo O’O”, chiamato la differenza astigmatica, aumenta, in generale, con l’angolo W fatto dal raggio principale OP con l’asse del sistema, cioè con il campo visivo. Due superfici dell’immagine astigmatica corrispondono a un piano dell’oggetto; e queste sono in contatto nel punto dell’asse; da una si trovano le linee focali del primo tipo, dall’altra quelle del secondo. I sistemi in cui le due superfici astigmatiche coincidono sono definiti anastigmatici o stigmatici.
Sir Isaac Newton fu probabilmente lo scopritore dell’astigmazione; la posizione delle linee di immagine astigmatiche è stata determinata da Thomas Young; e la teoria è stata sviluppata da Allvar Gullstrand. Una bibliografia di P. Culmann è dato in Moritz von Rohr Die Bilderzeugung in optischen Instrumenten.
Aberrazione di punti di oggetti laterali con matite larghe — comaEdit
Aprendo lo stop più ampio, si verificano deviazioni simili per i punti laterali come sono già state discusse per i punti assiali; ma in questo caso sono molto più complicate. Il corso dei raggi nella sezione meridionale non è più simmetrico al raggio principale della matita; e su un piano d’intercettazione appare, invece di un punto luminoso, una macchia di luce, non simmetrica rispetto a un punto, e spesso mostra una somiglianza con una cometa che ha la coda diretta verso o lontano dall’asse. Da questo aspetto prende il nome. La forma asimmetrica della matita meridional—precedentemente l’unica considerata—è coma solo in senso stretto; altri errori di coma sono stati trattati da Arthur König e Moritz von Rohr, e più tardi da Allvar Gullstrand.
Curvatura di campo del imageEdit
Se gli errori sopra essere eliminati, i due astigmatica superfici uniti, e una forte immagine ottenuta con un diaframma rimane la necessità di correggere la curvatura della superficie dell’immagine, soprattutto quando l’immagine è di essere ricevuti su una superficie piana, ad esempio nel campo della fotografia. Nella maggior parte dei casi la superficie è concava verso il sistema.
Distorsione dell’immaginemodifica

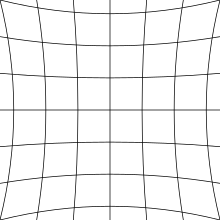
Anche se l’immagine è nitida, potrebbe essere distorta rispetto alla proiezione del foro stenopeico ideale. Nella proiezione pinhole, l’ingrandimento di un oggetto è inversamente proporzionale alla sua distanza dalla telecamera lungo l’asse ottico in modo che una telecamera che punta direttamente su una superficie piana riproduca quella superficie piana. La distorsione può essere pensata come un allungamento dell’immagine non uniforme o, equivalentemente, come una variazione dell’ingrandimento attraverso il campo. Mentre la ” distorsione “può includere la deformazione arbitraria di un’immagine, la modalità di distorsione più pronunciata prodotta dall’ottica di imaging convenzionale è la” distorsione a barilotto”, in cui il centro dell’immagine è ingrandito più del perimetro (figura 3a). Il rovescio, in cui il perimetro è ingrandito più del centro, è noto come” distorsione a puntaspilli ” (figura 3b). Questo effetto è chiamato distorsione dell’obiettivo o distorsione dell’immagine e ci sono algoritmi per correggerlo.
I sistemi privi di distorsione sono chiamati ortoscopici (orthos, right, skopein to look) o rettilinei (linee rette).

Questa aberrazione è ben distinta da quella della nitidezza della riproduzione; in unsharp, riproduzione, sorge la questione della distorsione se solo parti dell’oggetto possono essere riconosciute nella figura. Se, in un’immagine di contrasto, una zona di luce corrisponde a un punto oggetto, il centro di gravità della zona può essere considerato come il punto dell’immagine, questo è il punto in cui il piano che riceve l’immagine, ad esempio, uno schermo di messa a fuoco, interseca il raggio che passa attraverso il centro dell’arresto. Questa ipotesi è giustificata se una scarsa immagine sullo schermo di messa a fuoco rimane ferma quando l’apertura è diminuita; in pratica, questo si verifica generalmente. Questo raggio, chiamato da Abbe un raggio principale (da non confondere con i raggi principali della teoria gaussiana), passa attraverso il centro della pupilla di ingresso prima della prima rifrazione e il centro della pupilla di uscita dopo l’ultima rifrazione. Da ciò ne consegue che la correttezza del disegno dipende esclusivamente dai raggi principali; ed è indipendente dalla nitidezza o dalla curvatura del campo dell’immagine. Riferendosi alla fig. 4, abbiamo O’Q’/OQ = a ‘tan w’ / a tan w = 1 / N, dove N è la scala o l’ingrandimento dell’immagine. Perché N sia costante per tutti i valori di w, anche un’tan w’ /un tan w deve essere costante. Se il rapporto a’/a è sufficientemente costante, come spesso accade, la relazione di cui sopra si riduce alla condizione di Airy, cioè tan w’/ tan w= a costante. Questa semplice relazione (vedi Camb. Phil. Trans., 1830, 3, pag. 1) è soddisfatta in tutti i sistemi che sono simmetrici rispetto al loro diaframma (brevemente denominati obiettivi simmetrici o olosimmetrici), o che consistono di due componenti simili, ma di dimensioni diverse, posizionati dal diaframma nel rapporto tra le loro dimensioni e che presentano la stessa curvatura ad esso (obiettivi emisimmetrici); in questi sistemi tan w’ / tan w = 1.
La costanza di un’/un necessario per questa relazione di attesa è stato sottolineato da R. H. Bow (Brit. Journ. Foto., 1861), e Thomas Sutton (Photographic Notes, 1862); è stato trattato da O. Lummer e da M. von Rohr (Zeit. f. Instrumentenk., 1897, 17, e 1898, 18, pag. 4). Richiede che il centro dell’arresto dell’apertura sia riprodotto nei centri delle pupille di entrata e di uscita senza aberrazione sferica. M. von Rohr ha mostrato che per sistemi che non soddisfano né la condizione Airy né la condizione Bow-Sutton, il rapporto a’ cos w ‘ / a tan w sarà costante per una distanza dell’oggetto. Questa condizione combinata è esattamente soddisfatta dagli obiettivi olosimmetrici che si riproducono con la scala 1 e dall’emisimmetrico, se la scala di riproduzione è uguale al rapporto tra le dimensioni dei due componenti.
Modello Zernike delle aberrazionimodifica
I profili del fronte d’onda circolare associati alle aberrazioni possono essere modellati matematicamente usando i polinomi Zernike. Sviluppato da Frits Zernike nel 1930, polinomi di Zernike sono ortogonali su un cerchio di raggio unitario. Un profilo di fronte d’onda complesso e aberrato può essere curvato con polinomi Zernike per produrre un insieme di coefficienti di adattamento che rappresentano individualmente diversi tipi di aberrazioni. Questi coefficienti di Zernike sono linearmente indipendenti, quindi i contributi individuali di aberrazione a un fronte d’onda complessivo possono essere isolati e quantificati separatamente.
Esistono polinomi di Zernike pari e dispari. I polinomi di Zernike pari sono definiti come
Z n m ( ρ , ϕ ) = R n m ( ρ ) cos cos (m m ) {\displaystyle Z_{n}^{m} (\rho ,\phi )=R_{n}^{m} (\rho )\,\cos (m\,\phi )\!}

e i polinomi dispari di Zernike come
Z n − m ( ρ , ϕ ) = R n m ( ρ ) sin sin ( m m ) , {\displaystyle Z_{n}^{-m}(\rho ,\phi )=R_{n}^{m}(\rho )\,\sin(m\,\phi ),\!}

dove m e n sono interi non negativi con n ≥ m {\displaystyle n \ geq m}

, Φ è l’angolo azimutale in radianti e ρ è la distanza radiale normalizzata. I polinomi radiali R n m {\displaystyle R_{n}^{m}}

non hanno dipendenza azimutale e sono definiti come R n m ( ρ) = k k = 0 (n − m ) / 2 (−1 ) k (n − k ) ! k ! ((n + m) / 2-k)! ((n-m) / 2-k)! ρ n-2 k se n-m è pari {\displaystyle R_{n}^{m}(\rho )=\!\ sum _{k=0}^{(n-m)/2}\!\!\!{\frac {(-1)^{k}\, (n-k)!{k!\, ((n + m)/2-k)!\, ((n-m)/2-k)!}}\; \ rho ^ {n-2\, k} \ quad {\mbox{if}} n-m {\mbox {is even}}}

e R n m ( ρ ) = 0 {\displaystyle R_{n}^{m}(\rho )=0}

se n − m {\displaystyle n-m}

è dispari.
I primi polinomi di Zernike, moltiplicati per i rispettivi coefficienti di adattamento, sono:
0 × 1 {\displaystyle a_{0}\times 1}
 |
“Pistone”, pari al valore medio del fronte d’onda |
1 × ρ cos ( ϕ ) {\displaystyle a_{1}\times \rho \cos(\phi )}
 |
“X-Tilt”, lo scostamento complessivo del fascio in direzione sagittale |
2 × ρ sin ( ϕ ) {\displaystyle a_{2}\times \rho \sin(\phi )}
 |
“Y-Tilt”, lo scostamento complessivo del fascio in tangenziale direzione |
un 3 × ( 2 ρ 2 − 1 ) {\displaystyle a_{3}\times (2\rho ^{2}-1)}
 |
“Defocus”, una parabola di fronte d’onda risultante dall’essere fuori fuoco |
un 4 × ρ 2 cos ( 2 ϕ ) {\displaystyle a_{4}\times \rho ^{2}\cos(2\phi )}
 |
“0° Astigmatismo”, di forma cilindrica, lungo l’asse X o Y |
5 × r 2 sin ( 2 ϕ ) {\displaystyle a_{5}\times \rho ^{2}\sin(2\phi )}
 |
“45° Astigmatismo”, di forma cilindrica orientato a ±45° rispetto all’asse X |
un 6 × ( 3 ρ 2 − 2 ) ρ cos ( ϕ ) {\displaystyle a_{6}\times (3\rho ^{2}-2)\rho \cos(\phi )}
 |
“X-Coma”, l’immagine flaring in direzione orizzontale |
7 × ( 3 ρ 2 − 2 ) ρ sin ( ϕ ) {\displaystyle a_{7}\times (3\rho ^{2}-2)\rho \sin(\phi )}
 |
“Y-Coma”, l’immagine flaring in direzione verticale |
un 8 × ( 6 ρ 4 − 6 ρ 2 + 1 ) {\displaystyle a_{8}\times (6\rho ^{4}-6\rho ^{2}+1)}
 |
“Terzo ordine di aberrazione sferica” |
dove ρ {\displaystyle \rho }

è normalizzata alunno raggio con 0 ≤ r ≤ 1 {\displaystyle 0\leq \rho \leq 1}

, ϕ {\displaystyle \phi }

è l’angolo azimutale intorno alla pupilla con 0 ≤ ϕ ≤ 2 π {\displaystyle 0\leq \phi \leq 2\pi }

, e il montaggio dei coefficienti di 0 , … , 8 {\displaystyle a_{0},\ldots ,a_{8}}

sono il fronte d’onda errori in lunghezze d’onda.
Come nella sintesi di Fourier usando seni e coseni, un fronte d’onda può essere perfettamente rappresentato da un numero sufficientemente grande di polinomi di Zernike di ordine superiore. Tuttavia, i fronti d’onda con pendenze molto ripide o struttura di frequenza spaziale molto alta, come prodotta dalla propagazione attraverso turbolenza atmosferica o campi di flusso aerodinamici, non sono ben modellati dai polinomi di Zernike, che tendono a filtrare la definizione spaziale fine passa-basso nel fronte d’onda. In questo caso, altri metodi di fitting come frattali o decomposizione del valore singolare possono produrre risultati di fitting migliorati.
I polinomi circolari sono stati introdotti da Frits Zernike per valutare l’immagine puntiforme di un sistema ottico aberrato tenendo conto degli effetti della diffrazione. L’immagine puntiforme perfetta in presenza di diffrazione era già stata descritta da Airy, già nel 1835. Ci sono voluti quasi cento anni per arrivare a una teoria completa e modellazione dell’immagine puntiforme di sistemi aberrati (Zernike e Nijboer). L’analisi di Nijboer e Zernike descrive la distribuzione dell’intensità vicino al piano focale ottimale. Una teoria estesa che consente il calcolo dell’ampiezza e dell’intensità dell’immagine puntiforme su un volume molto più grande nella regione focale è stata recentemente sviluppata (teoria estesa di Nijboer-Zernike). Questa teoria estesa di Nijboer-Zernike della formazione dell’immagine puntiforme o della “funzione di diffusione del punto” ha trovato applicazioni nella ricerca generale sulla formazione dell’immagine, specialmente per sistemi con un’alta apertura numerica, e nella caratterizzazione dei sistemi ottici rispetto alle loro aberrazioni.