Tutti i paradigmi vengono eseguiti utilizzando uno Shuttlebox
Home Page-Comune di Roma
Evitamento
Evitamento attivo
Evitamento attivo è ciò che viene tipicamente pensato come apprendimento evitamento. A causa delle diverse associazioni che possono essere formate dal mouse durante l’apprendimento dell’evitamento, si è pensato di coinvolgere sia i processi di condizionamento classici che operanti (il più famoso caratterizzato dalla Teoria dell’apprendimento a due fattori di Hobart Mowrer).
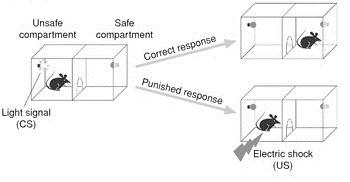
Branchi & Ricceri (2013)
I paradigmi di evitamento attivo richiedono che il mouse impari ad evitare uno stimolo avversivo (uno shock) avviando un comportamento (locomozione). Il mouse è collocato in uno dei due scomparti shuttlebox. Sono esposti a uno stimolo condizionato(luce, tono, ecc.) seguito dalla consegna di un footshock (stimolo incondizionato). Due tipi di risposta possono emergere direttamente dopo questa fase di esposizione: una risposta condizionata (apprendimento di evitamento) e una risposta incondizionata (apprendimento di fuga) – spesso le risposte di fuga precedono l’emergere di risposte di evitamento. L’evitamento è caratterizzato dalla risposta in cui un mouse evita attivamente lo shock in arrivo spostandosi nel compartimento opposto dopo la presentazione del CS. La fuga è caratterizzata dalla risposta in cui un mouse non risponde al CS, ma risponde agli Stati Uniti fuggendo nel compartimento opposto.
Evitamento passivo
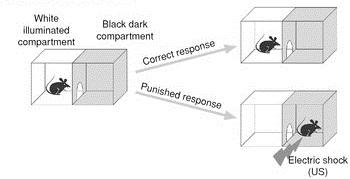
Branchi & Ricceri (2013)
I paradigmi di evitamento passivo richiedono al mouse di sopprimere un comportamento (innato) per evitare uno stimolo avversivo (uno shock). Una navetta è disposta in modo che un vano sia ” scuro “(attraverso l’uso di pareti opache o una copertura esterna) e uno sia ” leggero.”I topi hanno un’innata tendenza a preferire le aree scure a quelle chiare, quindi il loro istinto naturale sarà quello di spostarsi, attraverso una porta di collegamento, dal compartimento chiaro in cui sono collocati al compartimento scuro. Durante l’acquisizione, questo comportamento innato provoca la chiusura della porta di collegamento e uno shock avverso viene consegnato al mouse nel vano buio. Il mouse dovrebbe, quindi, imparare che il passaggio al compartimento scuro ha conseguenze negative. Durante la fase di test, il mouse viene nuovamente posizionato nel vano luce e monitorato. L’evitamento passivo è valutato come la soppressione del comportamento (innato) di muoversi nel compartimento scuro. Come tale, la latenza per entrare nel vano scuro (se il mouse fa a tutti) viene misurata. Questa misura è correlata con la memoria.
Escape
Escape conditioning si verifica quando un animale impara a eseguire un comportamento operante per terminare un evento o uno stimolo avversivo. In uno shuttlebox, ciò si verifica quando un mouse impara a fuggire (cioè a spostarsi) nel compartimento opposto dopo aver ricevuto un footshock nel loro compartimento corrente. È un classico esempio di rinforzo negativo.
Impotenza appresa
L’impotenza appresa si verifica quando un topo è stato esposto a un evento o stimolo avversivo ineludibile. Utilizzando uno shuttlebox, un mouse viene posizionato in uno scomparto con la porta dello scomparto opposto chiusa. Il mouse riceve quindi un footshock e non può sfuggire. Dopo diverse presentazioni in queste circostanze, un mouse ha difficoltà a imparare a evitare o sfuggire al footshock anche quando è in grado di farlo. Dopo l’inevitabile presentazione di stimoli avversivi (footshocks), un topo impara che non ha alcun controllo su queste presentazioni (o sul suo ambiente). Ciò porta a un comportamento impotente generalizzato (impotenza appresa) che persiste anche quando l’ambiente/le contingenze cambiano in modo che gli stimoli avversivi non siano più inevitabili. L’impotenza appresa è un comportamento associato e influenzato dalla depressione negli esseri umani.