完全な光学系では、古典的な光学理論では、任意の物体点から進む光線が像点に団結し、したがって物体空間は像空間に再現される。 焦点距離と焦点面という名前のガウスによる簡単な補助用語の導入は、任意のシステムの任意のオブジェクトの画像の決定を可能にします。 しかし、ガウス理論は、光軸(システムの対称軸)を持つすべての光線によって作られる角度が無限に小さい限り、すなわち無限小の物体、画像、レンズである限り真実であり、実際にはこれらの条件は実現されない可能性があり、補正されていないシステムによって投影される画像は、一般的に定義が悪く、絞りや視野が一定の限界を超えるとぼやけてしまうことが多い。
James Clerk MaxwellとErnst Abbeの調査によると、これらの複製の特性は、すなわち、次のように示されています。 画像の相対位置と大きさは、光学系の特別な特性ではなく、画像点内の空間のすべての点の再生の仮定(アッベあたり)の必要な結果であり、再生が行われる方法とは無関係である。 しかし、これらの著者らは、反射と屈折の基本法則と矛盾しているため、これらの仮定を正当化する光学系はないことを示しました。 したがって、ガウス理論は現実を近似する便利な方法のみを提供します; 現実的な光学系は、この達成不可能な理想には及ばない。 現在、達成することができるのは、単一の平面を別の平面に投影することだけですが、この場合でも、収差は常に発生し、これらが完全に修正されるこ
軸点の収差(制限された意味での球面収差)編集

をSとする(図10)。 1)任意の光学系であっても、角度u1の下で軸点Oから進む光線は、軸点O’1に団結します; そして、軸点O’2における角度u2の下のもの。 集合球面または薄い正のレンズを通る屈折がある場合、角度u2がu1より大きい限り(補正下)、逆に分散面またはレンズ(補正上)ではO’2はO’1の前に位置する。 苛性は、最初のケースでは、記号>(より大きい)に似ています。 角度u1が非常に小さい場合、O’1はガウス像であり、O’1O’2は縦収差と呼ばれ、O’1Rは開口u2を有する鉛筆の横収差と呼ばれる。 角度u2の鉛筆が送信されたすべての鉛筆の最大収差のものである場合、O’1の軸に垂直な平面には半径O’1Rの混乱の円形ディスクがあり、O’2の平行平面には半径O’2R2の別のものがあり、これら二つの間には最も混乱の少ないディスクが位置している。
oの再現に関与する鉛筆の最大の開口部、すなわち角度uは、一般的に、レンズの一方のマージンまたはシステムのレンズの間、前、または後ろに置かれた薄板の穴によって決定される。 この穴は停止かダイヤフラムと名づけられます;アッベはレンズの穴そして限界差益両方のために言葉の開き停止を使用しました。 開口絞りと物体Oとの間に位置するシステムの構成要素S1は、Abbeによって入口瞳孔と呼ばれる絞りの画像を投影する;出口瞳孔は、開口絞りの背後に Oから出て開口絞りを通過するすべての光線は、開口絞りの画像であるため、入り口と出口の瞳孔を通過します。 Oから発行される鉛筆の最大開口は、この時点での入口瞳孔によってサブテンドされる角度uであるため、収差の大きさは、入口瞳孔の位置および直径によって決定される。 システムが完全に開口絞りの後ろにある場合、これはそれ自体が入口瞳孔(前停止)であり、完全に前にある場合、それは出口瞳孔(後停止)である。
物体点が無限遠の場合、システムの最初のメンバーによって受信されたすべての光線は平行であり、システムを横断した後の交差は、入射の垂直高さ、 この距離は、前述の考慮事項の角度uを置き換え、開口、すなわち入口瞳孔の半径がその最大値である。
の軸に対して直角に配置された要素の収差、すなわちOからの光線が発生した場合(図1)。 1)は並行していますが、平面の一部が非常に小さくても、軸にOで垂直な平面の一部の点も並行することには従いません。 レンズの直径が増加するにつれて(すなわち、開口の増加に伴って)、隣接する点Nは再現されるが、大きさがONに匹敵する収差が伴う。 アッベによれば、正弦条件sin u’1/sin u1=sin u’2/sin u2が点Oを再現するすべての光線について成立する場合、これらの収差は回避される。 物体点Oが無限遠の場合、u1とu2は垂直入射の高さであるh1とh2に置き換えられ、正弦条件はsin u’1/h1=sin u’2/h2になります。 この条件を満たし、球面収差のない系をアプラナティック(aplanatic、ギリシア語a-,privative,plann,a wandering)と呼ぶ。 この言葉は、最初にロバート・ブレアによって優れた無彩色を特徴付けるために使用され、その後、多くの作家によって球面収差からの自由を示すためにも使用された。
レンズの中心から光線の距離とともに収差が増加するため、レンズの直径が増加するにつれて収差が増加する(またはそれに応じて開口の直径に応じて)ので、開口を小さくすることによって像面に到達する光量を減らすことができる。
狭い鉛筆で横方向の物体点(軸を超えた点)の収差—乱視編集

点O(fig. 2)軸から有限の距離(または無限に遠い物体では、システムで有限の角度を下りる点)では、一般に、それから発行され、システムを横断する光線の鉛筆が開口停止を減らすことによって無限に狭くされた場合でも、急激に再現されない。 鉛筆が直角に屈折または反射面を満たしていないことが(例外的なケースを無視して)見られます。 a-、privative、stigmia、aポイント)。 鉛筆の光線は、一点ではなく、主光線に直角であると仮定することができる二つの焦点線で交差し、これらのうち、一つは、主光線とシステムの軸を含む平面にある、すなわち、鉛筆の光線は、主光線とシステムの軸を含む平面にある。 第一の主セクションまたは子午線セクションで、およびそれに直角に他の、すなわち第二の主セクションまたは矢状セクションで。 一方、二つの平面のそれぞれにおいて、線O’とO”が別々に形成され(隣接する平面では楕円が形成される)、O’とO”の間の平面では、最も混乱の少ない円が形成される。 非点差と呼ばれる間隔O’o”は、一般に、主光線OPによってなされる角度Wと、システムの軸、すなわち視野との間で増加する。 二つの非点像面は一つの物体面に対応しており、これらは軸点で接触しており、一方には第一種の焦点線があり、他方には第二種の焦点線がある。 二つの非点面が一致するシステムは、非点面またはスティグマティックと呼ばれます。
サー-アイザック-ニュートンはおそらく乱視の発見者でした; 乱視画像線の位置はThomas Youngによって決定され、理論はAllvar Gullstrandによって開発されました。 P.Culmannによる参考文献は、Moritz von Rohrのdie Bilderzeugung in optischen Instrumentenに記載されています。
広い鉛筆で横方向のオブジェクト点の収差—comaEdit
ストップを広く開くことにより、軸方向の点について既に議論されているように横方向の点にも同様の偏差が生じるが、この場合ははるかに複雑である。 子午線セクションの光線のコースはもはや鉛筆の主光線に対称ではなく、傍受面には、発光点の代わりに、光のパッチが現れ、点について対称ではなく、しばしば尾が軸に向かって、または軸から離れている彗星に似ている。 この外観から、それはその名前を取ります。 子午線鉛筆の非対称的な形-以前は唯一のものと考えられていた-狭い意味での昏睡のみである; 他の昏睡の誤りは、Arthur KönigとMoritz von Rohrによって、そして後にAllvar Gullstrandによって治療されています。
画像の場の曲率edit
上記の誤差を排除すると、二つの乱視面が統一され、広い開口でシャープな画像が得られます—特に写真撮影などで、画像が平面上に受信される場合、画像面の曲率を補正する必要があります。 ほとんどの場合、表面はシステムに向かって凹面です。

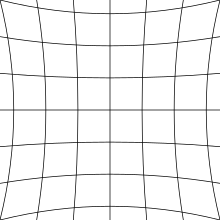
画像が鮮明であっても、理想的なピンホール投影と比較して歪んでいる可能性があります。 ピンホール投影では、オブジェクトの倍率は光軸に沿ったカメラまでの距離に反比例するため、平面を直接指すカメラはその平面を再現します。 歪みは、画像を不均一に引き伸ばすこと、または同等に、視野全体の倍率の変化と考えることができる。 “歪み”は画像の任意の変形を含むことができますが、従来の撮像光学系によって生成される歪みの最も顕著なモードは、画像の中心が周囲よりも拡大された”バレル歪み”です(図3a)。 周囲が中心よりも拡大されている逆は、”挟み込み歪み”として知られています(図3b)。 この効果は、レンズの歪みや画像の歪みと呼ばれ、それを修正するアルゴリズムがあります。
歪みのないシステムは、orthoscopic(orthos、right、skopein to look)またはrectilinear(直線)と呼ばれます。

この収差は再現の鋭さとはかなり異なっており、unsharp、再現では、オブジェクトの一部だけが図に認識できる場合に歪みの問題が発生します。 シャープでない画像において、光のパッチが物体点に対応する場合、パッチの重心は画像点とみなすことができ、これは、画像を受信する平面、例えば、集束スク この仮定は、絞りが減少したときにフォーカススクリーン上の貧弱な画像が静止したままである場合に正当化される。 アッベによって主光線(ガウス理論の主光線と混同しないでください)と命名されたこの光線は、最初の屈折の前に入口瞳孔の中心を通過し、最後の屈折の後に出口瞳孔の中心を通過する。 このことから、描画の正確さは主光線のみに依存し、画像場の鮮明度または曲率とは無関係であることになる。 を参照する。 図4に示すように、O’Q’/OQ=a’tan w’/a tan w=1/Nがあり、ここで、Nは画像のスケールまたは倍率である。 Nがwのすべての値に対して一定であるためには、a’tan w’/a tan wも一定でなければなりません。 比a’/aが十分に一定である場合、しばしばそうであるように、上記の関係はエアリーの条件、すなわちtan w’/tan w=a定数に帰着する。 この単純な関係(Cambを参照してください。 フィル トランス 1830年3月、p. 1)は、それらのダイヤフラムに関して対称であるすべてのシステムで満たされています(簡単に対称またはholosymmetrical目的と呼ばれます),または二つのような,しかし、異なるサイズのコンポーネントで構成されています,それらのサイズの比でダイヤフラムから配置されます,そして、それに同じ曲率を提示します(半球対称目的);これらのシステムではtan w’/tan w=1.
この関係を保持するために必要なa’/aの恒常性は、R.H.Bow(Brit. Journ. フォトログ 1861年)、およびThomas Sutton(Photographic Notes、1862年);それはO.LummerおよびMによって扱われている。 フォン-ロール(Zeit. F.Instrumentenk. ら,1 8 9 7,1 7,および1 8 9 8,1 8,4頁)。 それは球面収差なしで入口および出口の生徒の中心で再生されるように開き停止の中間が要求する。 M.von Rohrは、エアリー条件もボウ-サットン条件も満たさない系に対して、比a’cos w’/a tan wは物体の一つの距離に対して一定であることを示した。 この組み合わせ条件は、スケール1で再現するホロ対称目的によって正確に満たされ、再現のスケールが二つの成分のサイズの比に等しい場合は半球対称
収差のゼルニケモデル編集
収差に関連する円形波面プロファイルは、ゼルニケ多項式を用いて数学的にモデル化することができる。 1930年代にFrits Zernikeによって開発されたZernikeの多項式は、単位半径の円上で直交しています。 複素、異常波面プロファイルは、異なるタイプの収差を個別に表す一組の近似係数を得るために、Zernike多項式で曲線適合させることができる。 これらのZernike係数は線形に独立であり、したがって、全体的な波面への個々の収差寄与は、分離され、別々に定量化され得る。
偶数と奇数のゼルニケ多項式があります。 偶数ゼルニケ多項式は
Z n m(ρ,ρ)=r n m(ρ)cos ρ(m ρ){\displaystyle Z_{n}{{m}(\rho,\phi)=R_{n}!{m}(\rho)\,\cos(m\,\phi)\! Z Z_{n}Z{{m}}(\rho、\phi)=R_{n}m{m}(\rho)\、\cos(m\、\phi)\!Z n−m(λ,λ)=r n m(λ)sin(m λ){\displaystyle Z_{n}-{-m}(\rho,\phi)=R_{n}m{m}(\rho)\,\sin(m\,\phi),\! Z Z_{n}Z{{-m}}(\rho、\phi)=R_{n}m{m}(\rho)\、\sin(m\、\phi)、\!
ここで、mとnはn≥m{\displaystyle n\geq m}を持つ非負の整数である。}

、Φはラジアン単位の方位角、θは正規化された半径方向の距離です。 半径方向多項式R n m{\displaystyle R_{n}^{m}}

は方位角依存性を持たず、R n m(λ)=λ k=0(n−m)/2(−1)k(n−k)と定義される。 k! ((n+m)/2-k)! ((n-m)/2-k)! n−mが偶数{\displaystyle R_{n}!{m}(\rho)=\!}であれば、∑n−2k{\displaystyle R_{n}k{m}(\rho)=\!}となる。sum sum_{k=0}!{(n-m)/2}\!\!\!{\frac{(-1)!{k}\、(n-k)!}{k!\,((n+m)/2-k)!\,((n-m)/2-k)!r_{n}R{m}(\rho)=\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!\!sum sum_{{k=0}}!{{(n-m)/2}}\!\!\!{\frac{(-1)!{k}\、(n-k)!}{k!\,((n+m)/2-k)!\,((n-m)/2-k)!}}\;\rho^{{n-2\、k}}\quad{\mbox{if}}n-m{\mbox{もし}}evenが偶数であることを示します。}}
そしてR n m(ρ)=0{\displaystyle R_{n}^{m}(\rho)}である。)=0}

が奇数のとき、r_{n}^{m}(\rho)=0″>となる。
最初のいくつかのツェルニケ多項式にそれぞれの近似係数を掛けたものは、次のようになります:
a0×1{\displaystyle a_{0}\times}1}
 |
“波面の平均値に等しい”ピストン” |
a1×π cos π(π){\displaystyle a_{1}\times\rho\cos(\phi)})}
 |
“x-Tilt”、矢状方向の全体的なビームの偏差 |
a_{2}\times\rho\sin(\phi){\displaystyle a_{2}\times\rho\sin(\phi)}と書くことができる。)}
 |
“Y-Tilt”、接線方向の全体的なビームの偏差 |
a3×(2≤2−1){\displaystyle a_{3}\times(2\rho)}^{2}-1)}
 |
“焦点が合わないことに起因する放物線状の波面”Defocus” |
a4×√2cos(2π){\displaystyle a_{4}\times\rho^{2}\cos(2\phi)}{\displaystyle a_{4}\times\rho^{2}\cos(2\phi)}{\displaystyle a_{4}})}
 |
“0° 非点収差”、x軸またはY軸に沿った円筒形 |
5×√2の罪 A_{5}\times\rho^{2}\sin(2\phi){\displaystyle a_{5}\times\rho^{2}\sin(2\phi){\displaystyle a_{5}\times\rho^)}
 |
“45° 乱視”、x軸から±45°に配向した円筒形状 |
a6×(3π2−2)π cos π(π){\displaystyle a_{6}\times(3\rho^{2}-2)\rho\cos(\phi)}{\displaystyle a_{6}\times(3\rho^{2}-2)}{\displaystyle a_{6}\times(3\rho^{2}-2)})}
 |
“x-Coma”、水平方向にフレアコマ画像 |
a7×(3π2−2)π sin π(π){\displaystyle a_{7}\times}{\displaystyle a_{7}\times}{\displaystyle a_{7}\times} (3\rho^{2}-2)\rho\sin(\phi)phiはphi\phi sinで割り切れません。)}
 |
“Y-Coma”、垂直方向にフレアコマ画像 |
a8×(6≤4−6≤2+1){\displaystyle a_{8}\times(6\rho^{4}-6\rho)}{\displaystyle a_{8}\times(6\rho^{4}-6\rho)}{\displaystyle a_{8}}^{2}+1)}
 |
“三次球面収差” |
ここで、ρ{\displaystyle\rho}

は0≤1{\displaystyle0\leq\rho\leq1}を持つ正規化された瞳孔半径である。

,π{\displaystyle\phi}

は0≤2π{\displaystyle0\leq\phi\leq2\pi}
は瞳孔の周りの方位角である。5919>
、およびフィッティング係数a0,…,a8{\displaystyle a_{0},\ldots,a_{8}}

は波長の波面誤差です。
正弦と余弦を用いたフーリエ合成のように、波面は十分に大きな数の高次のゼルニケ多項式によって完全に表現される。 しかし、大気乱流や空力流場を通る伝播によって生成されるような、非常に急勾配または非常に高い空間周波数構造を有する波面は、波面内のローパスフィルタファイン空間定義になる傾向があるゼルニケ多項式によってはよくモデル化されていない。 この場合、フラクタルや特異値分解などの他の近似方法では、近似結果が改善される場合があります。
円多項式は、回折の影響を考慮して異常な光学系の点像を評価するためにFrits Zernikeによって導入されました。 回折の存在下での完全な点像は、1835年にはすでにAiryによって記述されていた。 異常なシステム(ZernikeとNijboer)の点像の包括的な理論とモデリングに到達するのに約100年かかりました。 NijboerとZernikeによる解析は,最適焦点面に近い強度分布を記述した。 焦点領域のはるかに大きな体積にわたって点像の振幅と強度を計算することを可能にする拡張理論が最近開発された(拡張Nijboer-Zernike理論)。 この拡張された点像または”点広がり関数”形成のNijboer-Zernike理論は、特に開口数の高いシステムに対する画像形成に関する一般的な研究、およびそれらの収差