すべてのパラダイムはシャトルボックスを使用して行われます
株式会社メッド-アソシエイツ
回避
アクティブ回避
アクティブ回避は、一般的に回避学習と考えられているものです。 回避学習中にマウスによって形成される可能性のある異なる関連付けのために、古典的およびオペラント条件付けプロセスの両方を含むと考えられている(最も有名なのはホバート-モウラーの二因子学習理論によって特徴付けられる)。
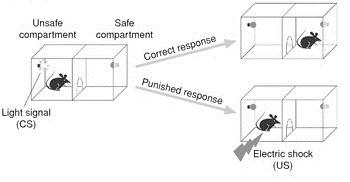
Branchi&Ricceri(2013)
能動的回避パラダイムは、マウスが行動(歩行)を開始することによって嫌悪刺激(ショック)を避けることを学ぶことを必要とする。 マウスは、2つのシャトルボックスのいずれかの区画に配置されます。 彼らは条件付けされた刺激(光、色調など)にさらされます。)に続いてフットショック(無条件刺激)の配信が続きます。 条件付き応答(回避学習)と無条件応答(エスケープ学習)-多くの場合、エスケープ応答は回避応答の出現の前に先行します。 回避は、マウスがCSが提示された後に反対側の区画に移動することによって対向衝撃を積極的に回避するところで応答することを特徴とする。 エスケープは、マウスがCSに応答しないところで応答することを特徴とするが、反対側の区画にエスケープすることによって米国に応答する。
受動的回避
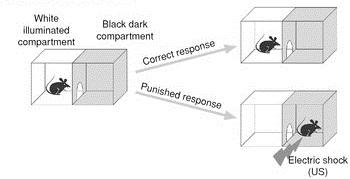
Branchi&Ricceri(2013)
受動的回避パラダイムは、マウスが嫌悪的刺激(ショック)を避けるために(生得的な)行動を抑制することを必要とする。 シャトルボックスは、1つの区画が「暗い」(不透明な壁または外部カバーを使用して)、1つが「明るい」ように配置されています。”マウスは明るいものよりも暗い部分を好む生来の傾向があるので、彼らの自然な本能は、彼らが置かれている明るい区画から暗い区画に、接続ドアを 獲得の間に、この生来の行動は接続ドアの締まることおよび暗いコンパートメントのマウスに渡される嫌悪的な衝撃で起因する。 したがって、マウスは、暗い区画に移動すると負の結果が生じることを学ぶべきである。 テスト段階の間に、マウスは軽いコンパートメントに再度置かれ、監視される。 受動的回避は、暗い区画に移動する(先天的な)行動の抑制として評価される。 そのため、暗い区画に入るための待ち時間(マウスがまったくない場合)が測定されます。 この尺度はメモリと相関しています。
エスケープ
エスケープコンディショニングは、動物が嫌悪イベントや刺激を終了するためにオペラント行動を実行することを学ぶときに発生します。 シャトルボックスでは、マウスが現在のコンパートメントでフットショックを受けた後、反対側のコンパートメントから脱出する(つまり、移動する)ことを学 それは否定的な補強の古典的な例です。
学習された無力感
学習された無力感は、マウスが避けられない嫌悪イベントまたは刺激にさらされたときに発生します。 シャトルボックスを使用して、マウスは反対側のコンパートメントへのドアを閉じた状態で1つのコンパートメントに配置されます。 その後、マウスはフットショックを受け取り、それを逃れることはできません。 このような状況下でいくつかのプレゼンテーションの後、マウスはそうすることができる場合でも、フットショックを回避したり、脱出することを学ぶ難しさを持っています。 避けられない嫌悪刺激(フットショック)の提示の後、マウスはこれらの提示(またはその環境)を制御できないことを学習します。 これは、嫌悪感の刺激がもはや避けられないように、環境/不測の事態が変化しても持続する一般化された無力な行動(学習された無力感)につながる。 学習された無力感は、人間のうつ病に関連し、影響を受ける行動です。