作物の受粉、捜索救助任務、監視、高解像度の気象、気候、環境モニタリングに使用される可能性のある昆虫風ロボット
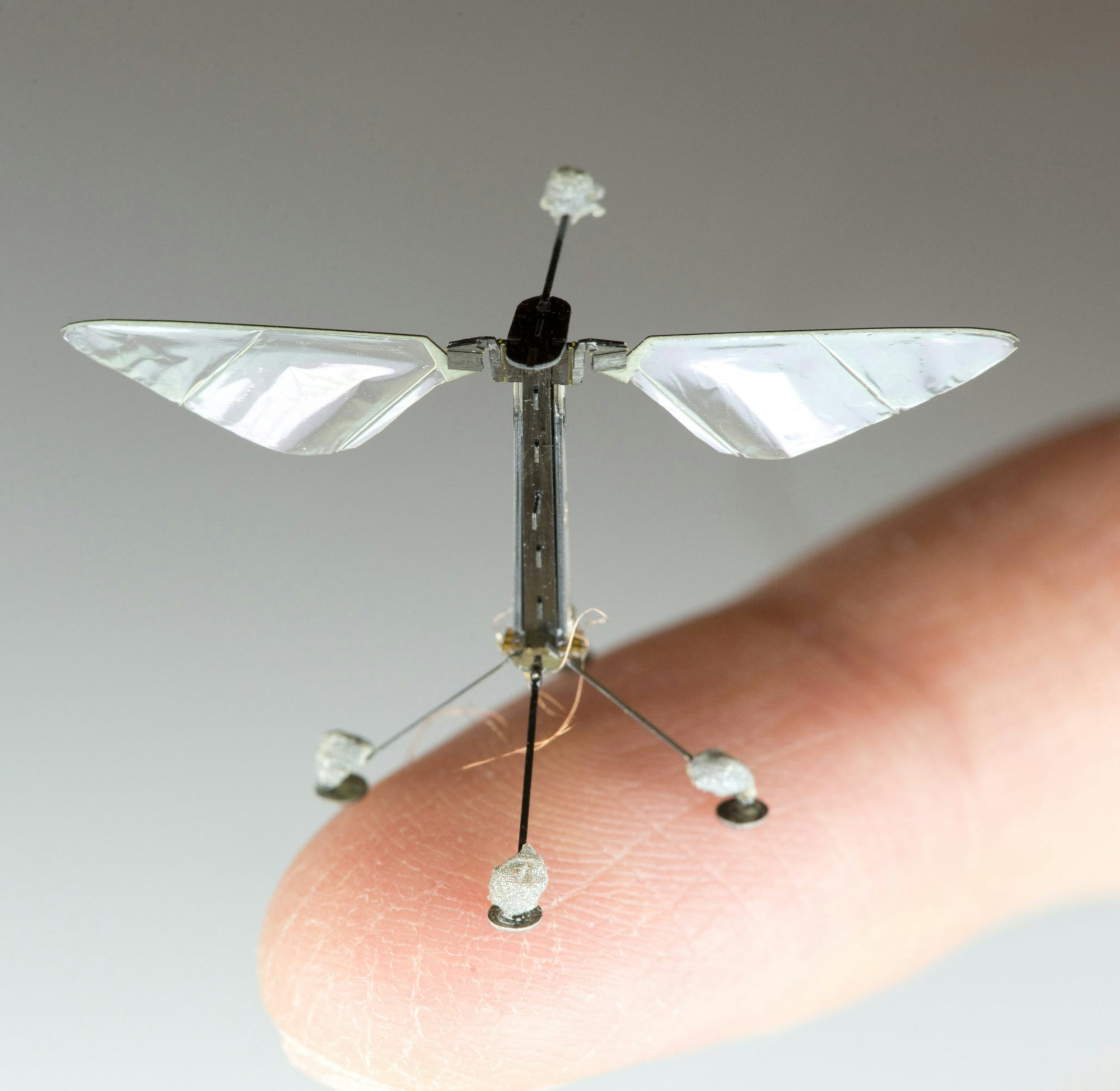
Wyss Instituteの研究者は、蜂の生物学に触発されて、農業や災害救助において無数の役割を果たすことができる人工システムであるRobobeesを開発しています。 ロボビーは、ペーパークリップの約半分のサイズを測定し、グラムの10分の1以下の重量を量り、電圧が印加されたときに収縮する材料の侵害された「人工筋肉」を使用して飛行します。 追加の変更により、RoboBeeの一部のモデルは、水中での水泳から飛行への移行、および静電気を使用した表面上の”パーチ”に移行することができます。
RoboBeeの首謀者は、自己完結型の自己指向飛行と大規模なグループでの協調行動を達成することができる自律的なマイクロ航空車両を開発するとい そのために、RoboBeeの開発は大きく三つの主要なコンポーネントに分かれています:体、脳、およびコロニー。 体の開発は、コンパクトでシームレスに統合された電源の助けを借りて、自分で飛ぶことができるロボット昆虫を構築することで構成されています;脳の開発は、ハチの目やアンテナを模倣し、感知し、環境に動的に応答することができ、”スマート”センサーや制御電子機器に関
それは私達がこれを試みることができたこと製造業、材料および設計のこの実験室の最近の進歩のために実際にだけある。 そして、それは見事にうまくいきました。

RoboBeesを構築するために、Wyss研究所の研究者は、革新的な製造方法、いわゆるポップアップmems技術(ポップアップMEMS技術のページも参照)を開発し、現在のロボ
RoboBeesの使用のためのすべての領域は、ライセンスのために利用可能です。