작물 수분,수색 및 구조 임무,감시,고해상도 날씨,기후 및 환경 모니터링에 잠재적으로 사용되는 곤충 영감 로봇
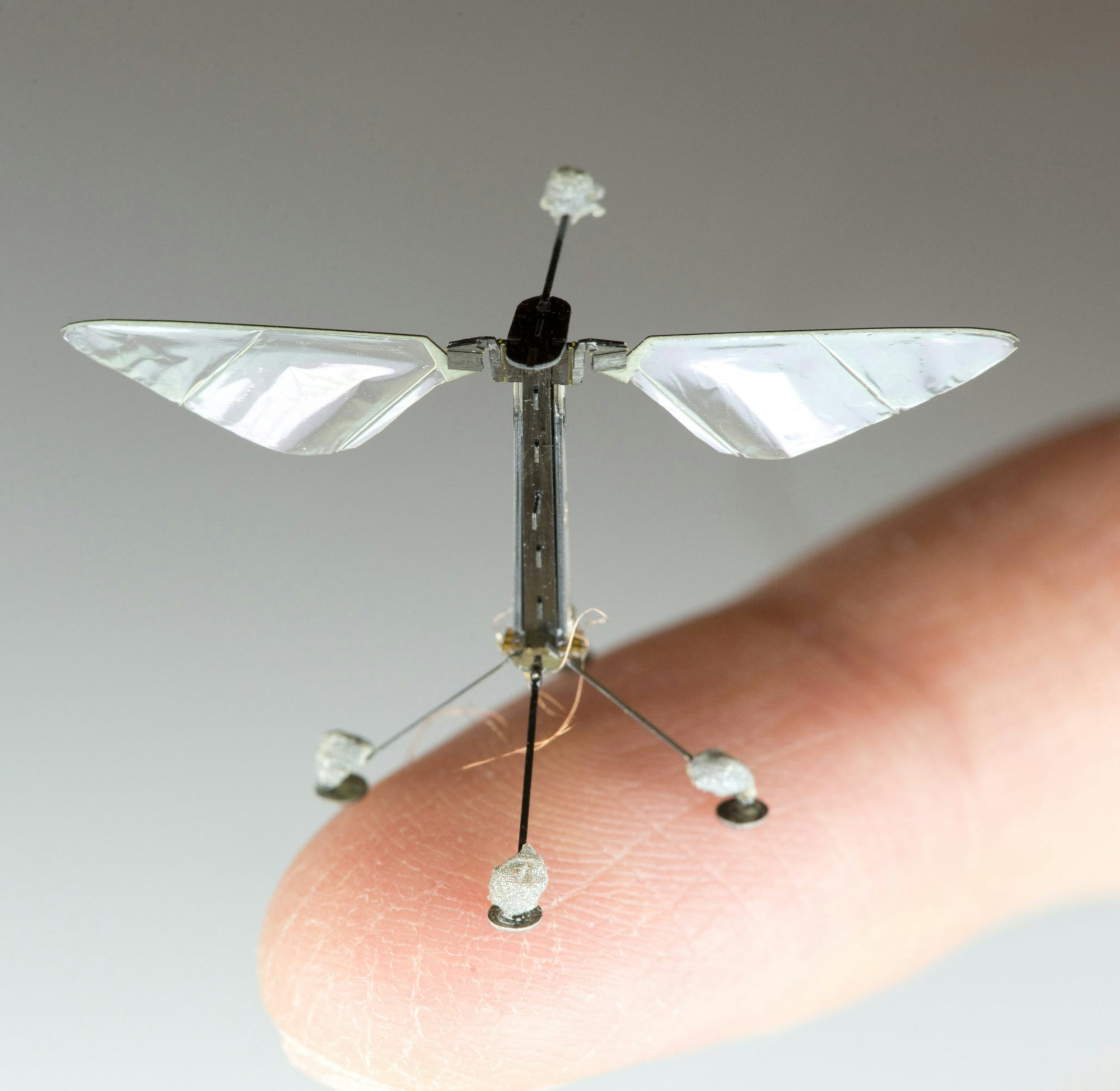
로보비의 배후는 자율주행,자율주행 비행을 할 수 있는 자율주행 마이크로 공중 차량을 개발하고 대규모 집단에서 조율된 행동을 달성하려는 아이디어에 의해 좌우되었다. 이를 위해 로보비 발달은 신체,뇌 및 식민지의 세 가지 주요 구성 요소로 크게 나뉩니다. 신체 발달은 작고 완벽하게 통합 된 전원의 도움으로 스스로 비행 할 수있는 로봇 곤충을 구성하는 것으로 구성됩니다;두뇌 발달은 꿀벌의 눈과 안테나를 모방하고 환경을 감지하고 동적으로 반응 할 수있는”스마트”센서 및 제어 전자 장치와 관련이 있습니다.식민지의 초점은 많은 독립적 인 로봇의 행동을 조정하여 효과적인 단위로 행동하는 것입니다.
이 연구소는 최근 제조,재료,디자인 분야에서 획기적인 발전을 이루었기 때문에 이것을 시도할 수 있었습니다. 그리고 그것은 단지 훌륭하게 잘 작동했습니다.

로보비를 만들기 위해 위스 연구소의 연구원들은 혁신적인 제조 방법,소위 팝업 마이크로 전자 기계 기술(팝업 멤 기술 페이지 참조)을 개발하여 현재 로봇 설계 및 엔지니어링의 경계를 크게 확장했습니다.
로보 비의 사용에 대한 모든 영역은 라이센스에 사용할 수 있습니다.