Insektinspirerte roboter med potensiell bruk i avlingspollinering, søk-og redningsoppdrag, overvåking, samt høyoppløselig vær -, klima-og miljøovervåking
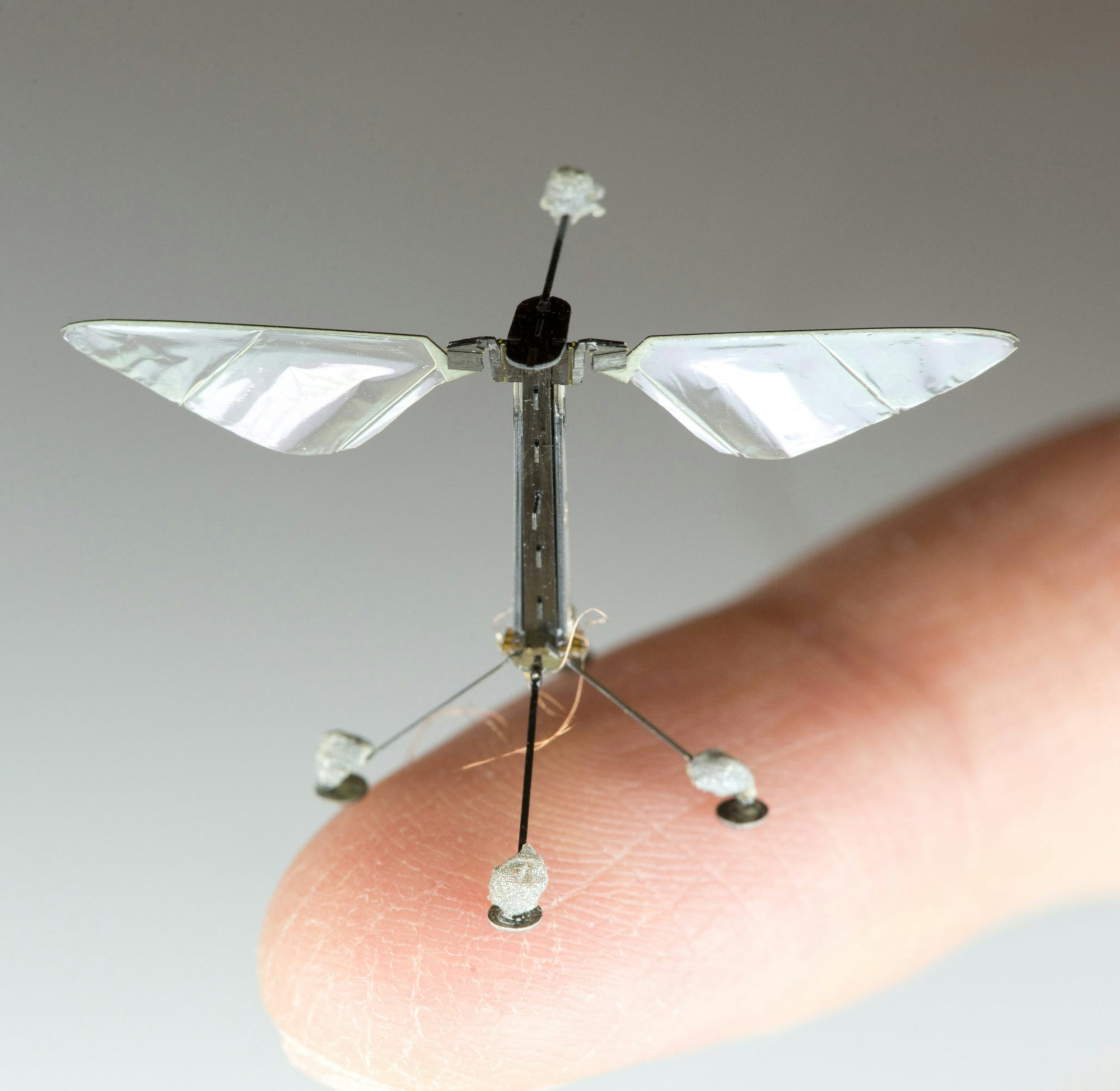
mastermindingen Av RoboBee var motivert av ideen om å utvikle autonome mikro-luftfartøyer som er i stand til selvstendig, selvstyrt flytur og å oppnå koordinert oppførsel i store grupper. For det formål Er RoboBee-utviklingen stort sett delt inn i tre hovedkomponenter: Kroppen, Hjernen og Kolonien. Kroppsutvikling består av å konstruere robotinsekter som er i stand til å fly alene ved hjelp av en kompakt og sømløst integrert strømkilde; hjernens utvikling er opptatt av «smarte» sensorer og kontrollelektronikk som etterligner øynene og antennene til en bi, og kan fornemme og reagere dynamisk på miljøet; Koloniens fokus handler om å koordinere oppførselen til mange uavhengige roboter, slik at de fungerer som en effektiv enhet.
det er egentlig bare på grunn av dette laboratoriets siste gjennombrudd innen produksjon, materialer og design at vi selv har kunnet prøve dette. Og det fungerte bare, spektakulært bra.

for å konstruere RoboBees, har forskere ved Wyss Institute utviklet innovative produksjonsmetoder, såkalte Pop-Up microelectromechanical (MEMs) teknologier (se Også Pop-Up MEMS teknologi side) som allerede har sterkt utvidet grensene for dagens robotikk design og engineering.
alle områder for Bruk Av RoboBees er tilgjengelige for lisensiering.