w doskonałym układzie optycznym w klasycznej teorii optyki promienie światła wychodzące z dowolnego punktu obiektu łączą się w punkcie obrazu, a zatem przestrzeń obiektu jest odtwarzana w przestrzeni obrazu. Wprowadzenie prostych terminów pomocniczych, ze względu na Gaussa, nazwanych ogniskowymi i płaszczyznami ogniskowymi, pozwala na określenie obrazu dowolnego obiektu dla dowolnego układu. Teoria Gaussa jest jednak prawdziwa tylko wtedy, gdy kąty wykonane przez wszystkie promienie z osią optyczną (osią symetryczną układu) są nieskończenie małe, tj. z nieskończenie małymi obiektami, obrazami i soczewkami; w praktyce warunki te mogą nie zostać zrealizowane, a obrazy rzutowane przez nieskorygowane systemy są ogólnie źle zdefiniowane i często rozmyte, jeśli przysłona lub pole widzenia przekracza pewne granice.
badania Jamesa Clerka Maxwella i Ernsta Abbe wykazały, że właściwości tych reprodukcji, tj. względne położenie i wielkość obrazów, nie są szczególnymi właściwościami układów optycznych, ale koniecznymi konsekwencjami przypuszczenia (per Abbe) reprodukcji wszystkich punktów przestrzeni w punktach obrazu i są niezależne od sposobu, w jaki reprodukcja jest dokonywana. Autorzy Ci wykazali jednak, że żaden układ optyczny nie może uzasadnić tych przypuszczeń, ponieważ są one sprzeczne z podstawowymi prawami odbicia i załamania. W konsekwencji teoria Gaussa dostarcza jedynie wygodnej metody przybliżania rzeczywistości; realistyczne systemy optyczne nie spełniają tego nieosiągalnego ideału. Obecnie wszystko, co można osiągnąć, to rzut jednej płaszczyzny na inną; ale nawet w tym zawsze występują aberracje i może być mało prawdopodobne, że kiedykolwiek zostaną one całkowicie skorygowane.
Aberracja punktów osiowych (aberracja sferyczna w sensie ograniczonym)Edytuj

Let S (rys. 1) być dowolny układ optyczny, promienie przechodzące od punktu osi O pod kątem u1 łączą się w punkcie osi O ’ 1; i te pod kątem u2 w punkcie osi O ’ 2. Jeśli istnieje załamanie na zbiorczej powierzchni sferycznej lub przez cienką soczewkę dodatnią, O '2 będzie leżeć przed O’ 1, dopóki kąt u2 jest większy niż u1 (pod korekcją); i odwrotnie z powierzchnią dyspersyjną lub soczewkami (nad korekcją). Żrący, w pierwszym przypadku, przypomina znak >(większy niż); w drugim < (mniejszy niż). Jeśli kąt u1 jest bardzo mały, O '1 jest obrazem Gaussa, A O '1 O’ 2 jest nazywane aberracją podłużną, a o ’ 1R aberracją boczną ołówków z aperturą u2. Jeśli ołówek o kącie u2 jest tym o maksymalnej aberracji wszystkich przenoszonych ołówków, to w płaszczyźnie prostopadłej do osi Przy O’1 znajduje się okrągły dysk pomieszania o promieniu O’1R, a w płaszczyźnie równoległej Przy O’ 2 Kolejny o promieniu O ’ 2R2; między tymi dwoma znajduje się dysk najmniejszego pomieszania.
największy otwór kredki, które biorą udział w reprodukcji O, czyli kąt u, jest na ogół określony przez margines jednej z soczewek lub przez otwór w cienkiej płytce umieszczonej między, przed lub za soczewkami systemu. Otwór ten nazywany jest ogranicznikiem lub membraną; Abbe użył terminu ogranicznik przysłony zarówno dla otworu, jak i marginesu ogranicznika obiektywu. Element S1 systemu, znajdujący się pomiędzy ogranicznikiem przysłony a obiektem O, Wyświetla obraz przepony, określany przez Abbe jako źrenica wejściowa; źrenica wyjściowa jest obrazem utworzonym przez komponent S2, który znajduje się za ogranicznikiem przysłony. Wszystkie promienie, które emitują Z O i przechodzą przez przystanek przysłony, przechodzą również przez źrenice wejściowe i wyjściowe, ponieważ są to obrazy przystanku przysłony. Ponieważ maksymalna przysłona ołówków emitujących od O jest kątem u podstawionym przez źrenicę wejściową w tym punkcie, wielkość aberracji będzie określona przez położenie i średnicę źrenicy wejściowej. Jeśli system znajduje się całkowicie za ogranicznikiem przysłony, to jest to samo w sobie źrenica wejściowa (przystanek przedni); jeśli całkowicie z przodu, jest to źrenica wyjściowa (przystanek tylny).
jeśli punkt obiektu jest nieskończenie odległy, wszystkie promienie otrzymane przez pierwszy człon układu są równoległe, a ich przecięcia po przemierzeniu układu różnią się w zależności od ich prostopadłej wysokości padania, tj. odległości od osi. Odległość ta zastępuje kąt u w powyższych rozważaniach, a przysłona, tj. promień źrenicy wejściowej, jest jej wartością maksymalną.
Aberracja elementów, czyli najmniejszych obiektów pod kątem prostym do osiedytuj
jeśli promienie emitujące od O (rys. 1) są współbieżne, nie wynika z tego, że punkty w części płaszczyzny prostopadłej na O do osi będą również współbieżne, nawet jeśli część płaszczyzny będzie bardzo mała. Wraz ze wzrostem średnicy obiektywu (tj. ze wzrostem przysłony), sąsiedni Punkt N zostanie odtworzony, ale z udziałem aberracji porównywalnych pod względem wielkości do ON. Aberracje te są unikane, jeśli, według Abbe, warunek sinus, sin u’1/sin u1=sin U’2/sin u2, utrzymuje dla wszystkich promieni odtwarzających punkt O. Jeśli punkt obiektu O jest nieskończenie odległy, u1 i u2 mają być zastąpione przez H1 i h2, prostopadłe wysokości padania; warunek sinusoidalny staje się wtedy sin u’1/h1=sin u’2/h2. Układ spełniający ten warunek i wolny od aberracji sferycznej nazywany jest aplanatycznym(Greckie a -, privative, plann, a). Słowo to zostało po raz pierwszy użyte przez Roberta Blaira do scharakteryzowania nadrzędnego achromatyzmu, a następnie przez wielu pisarzy do określenia wolności od aberracji sferycznej.
ponieważ aberracja wzrasta wraz z odległością promienia od środka obiektywu, aberracja wzrasta wraz ze wzrostem średnicy obiektywu (lub odpowiednio ze średnicą przysłony), a zatem można ją zminimalizować poprzez zmniejszenie przysłony, kosztem również zmniejszenia ilości światła docierającego do płaszczyzny obrazu.
Aberracja bocznych punktów obiektu (punktów poza osią) za pomocą wąskich ołówków — astygmatismedit

punkt O (rys. 2) w skończonej odległości od osi (lub w nieskończenie odległym obiekcie, punkt, który podwaja skończony kąt w systemie)jest, w ogóle, nawet wtedy nie gwałtownie reprodukowane, jeśli ołówek promieni emitujących z niego i przemierzających system jest nieskończenie wąski przez zmniejszenie zatrzymania apertury; taki ołówek składa się z promieni, które mogą przejść z punktu obiektu przez nieskończenie małą źrenicę wejściową. Widać (pomijając wyjątkowe przypadki), że ołówek nie spełnia powierzchni załamującej się lub odbijającej pod kątem prostym; dlatego jest astygmatyczny (gr. a -, privative, stygmia, a point). Promień centralny przechodzący przez źrenicę wejściową nazywa się osią ołówka lub promieniem głównym, można powiedzieć: promienie ołówka przecinają się nie w jednym punkcie, ale w dwóch liniach ogniskowych, które można założyć, że znajdują się pod kątem prostym do promienia głównego; z nich jedna leży w płaszczyźnie zawierającej promień główny i oś systemu, tj. w pierwszym odcinku głównym lub odcinku południkowym, a drugi pod kątem prostym do niego, tj. w drugim odcinku głównym lub odcinku strzałkowym. Otrzymujemy, zatem, w żadnej pojedynczej płaszczyźnie przechwytującej za systemem, jak, na przykład, ekran ogniskujący, obraz punktu obiektu; z drugiej strony, w każdej z dwóch płaszczyzn linie O 'I O” są oddzielnie utworzone (w sąsiednich płaszczyznach tworzą się elipsy), aw płaszczyźnie między O 'I O” okręgu najmniejszego zamieszania. Interwał O 'O”, zwany różnicą astygmatyczną, zwiększa się, w ogólności, wraz z kątem w wykonanym przez promień główny OP z osią układu, czyli z polem widzenia. Dwie astygmatyczne powierzchnie obrazu odpowiadają jednej płaszczyźnie obiektu, a te stykają się w punkcie osi; na jednej leżą linie ogniskowe pierwszego rodzaju, na drugiej linie ogniskowe drugiego. Systemy, w których dwie powierzchnie astygmatyczne pokrywają się, są określane jako anastigmatyczne lub stygmatyczne.
Sir Isaac Newton był prawdopodobnie odkrywcą astygmacji; położenie astygmatycznych linii obrazu zostało określone przez Thomasa Younga, a teorię opracował Allvar Gullstrand. Bibliografia autorstwa P. Culmanna znajduje się w „Die Bilderzeugung in optischen Instrumenten” Moritza von Rohra.
Aberracja bocznych punktów obiektu z szerokimi ołówkami — comaEdit
otwierając stop szerszy, pojawiają się podobne odchylenia dla punktów bocznych, jak już omówiono dla punktów osiowych; ale w tym przypadku są one znacznie bardziej skomplikowane. Przebieg promieni w części południkowej nie jest już symetryczny do głównego promienia ołówka; a na płaszczyźnie przechwytującej pojawia się, zamiast punktu świetlnego, plama światła, nie symetryczna wokół punktu i często wykazująca podobieństwo do komety z ogonem skierowanym w kierunku lub z dala od osi. Od tego wyglądu bierze swoją nazwę. Niesymetryczna forma ołówka meridionalnego-dawniej jedyna rozważana—jest tylko w węższym znaczeniu; inne błędy śpiączki leczyli Arthur König i Moritz von Rohr, a później Allvar Gullstrand.
krzywizna pola obrazuedit
jeśli powyższe błędy zostaną wyeliminowane, dwie powierzchnie astygmatyczne połączą się, a uzyskany ostry obraz z szerokim otworem przysłony—pozostaje konieczność skorygowania krzywizny powierzchni obrazu, zwłaszcza gdy obraz ma być odebrany na płaskiej powierzchni, np. w fotografii. W większości przypadków powierzchnia jest wklęsła w kierunku systemu.
zniekształcenie obrazuedytuj

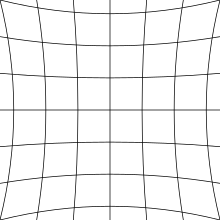
nawet jeśli obraz jest ostry, może być zniekształcony w porównaniu do idealnej projekcji otworkowej. W projekcji otworkowej powiększenie obiektu jest odwrotnie proporcjonalne do jego odległości od kamery wzdłuż osi optycznej, tak że kamera skierowana bezpośrednio na płaską powierzchnię odtwarza tę płaską powierzchnię. Zniekształcenia można traktować jako rozciąganie obrazu nierównomiernie lub równoważnie jako zmianę powiększenia w całym polu. Podczas gdy ” zniekształcenie „może obejmować dowolne odkształcenie obrazu, najbardziej wyraźnymi trybami zniekształceń wytwarzanymi przez konwencjonalną optykę obrazowania są” zniekształcenia beczkowe”, w których środek obrazu jest powiększony bardziej niż obwód (rysunek 3a). Rewers, w którym obwód jest powiększony bardziej niż środek, jest znany jako „zniekształcenie poduszkowe” (rysunek 3b). Efekt ten nazywany jest zniekształceniem obiektywu lub zniekształceniem obrazu i istnieją algorytmy, które go korygują.
Układy wolne od zniekształceń nazywane są ortoskopowymi (orthos, right, skopein to look) lub prostoliniowymi (straight lines).

ta aberracja jest zupełnie inna niż ostrość reprodukcji; w nieostrości, reprodukcji, pojawia się kwestia zniekształcenia, jeśli tylko części obiektu można rozpoznać na rysunku. Jeżeli na obrazie nieostrym plaster światła odpowiada punktowi obiektu, środek ciężkości plastra można uznać za punkt obrazu, przy czym jest to punkt, w którym płaszczyzna odbierająca obraz, np. ekran ogniskujący, przecina promień przechodzący przez środek stopu. Założenie to jest uzasadnione, jeśli słaby obraz na ekranie ogniskowania pozostaje nieruchomy, gdy przysłona jest zmniejszona; w praktyce zwykle tak się dzieje. Promień ten, nazwany przez Abbe promieniem głównym (nie mylić z promieniami głównymi teorii Gaussa), przechodzi przez środek źrenicy wejściowej przed pierwszym załamaniem, a środek źrenicy wyjściowej po ostatnim załamaniu. Wynika z tego, że poprawność rysunku zależy wyłącznie od promieni głównych i jest niezależna od ostrości lub krzywizny pola obrazu. Odnosząc się do rys. 4, mamy O ’ Q '/ OQ = a 'tan w’ /a tan w = 1 / n, gdzie N to skala lub powiększenie obrazu. Aby N było stałe dla wszystkich wartości w, „tan w” /tan w musi być również stałe. Jeśli stosunek a '/A jest wystarczająco stały, jak to często bywa, to powyższa relacja zmniejsza się do stanu przewiewności, tj. tan w’/ tan w= Stała. Ta prosta relacja (patrz Camb. Phil. Trans., 1830, 3, s. 1) spełnia się we wszystkich systemach, które są symetryczne względem membrany (w skrócie nazywane symetrycznymi lub holosymetrycznymi celami), lub które składają się z dwóch podobnych, ale różnej wielkości elementów, umieszczonych z membrany w stosunku ich wielkości i prezentujących tę samą krzywiznę (cele hemisymetryczne); w tych systemach tan w’ / tan w = 1.
stałość a’/a koniecznego dla tej relacji do hold wskazywał R. H. Bow (Brit. Journ. Fotog., 1861) i Thomas Sutton (Photographic Notes, 1862); traktowali go O. Lummer i M. von Rohr (Zeit. F. Instrumentenk., 1897, 17 i 1898, 18, s. 4). Wymaga, aby środek zatrzymania przysłony był odtwarzany w centrach źrenic wejściowych i wyjściowych bez aberracji sferycznej. M. von Rohr wykazał, że dla Systemów Nie spełniających ani warunku przewiewności, ani stanu Bow-Suttona stosunek A 'cos w’ /a tan w będzie stały dla jednej odległości obiektu. Ten łączny warunek jest dokładnie spełniony przez cele holosymetryczne odwzorowujące skalę 1, oraz przez cele hemisymetryczne, jeśli skala reprodukcji jest równa stosunkowi wielkości obu składników.
Zernike model aberracjedytuj
okrągłe profile falowe związane z aberracjami mogą być matematycznie modelowane za pomocą wielomianów Zernike ’ a. XX wieku, wielomiany Zernike ’ a są prostopadłe do okręgu o promieniu jednostkowym. Złożony, aberrowany profil falowy może być wyposażony w wielomiany Zernikego, aby uzyskać zestaw współczynników dopasowania, które indywidualnie reprezentują różne rodzaje aberracji. Te współczynniki Zernike ’ a są liniowo niezależne, a zatem poszczególne aberracje do ogólnej fali mogą być izolowane i kwantyfikowane oddzielnie.
istnieją parzyste i nieparzyste wielomiany Zernike ’ a. Parzyste wielomiany Zernikego są zdefiniowane jako
z N m (ρ , ϕ ) = R n m (ρ ) cos (m ϕ) {\displaystyle Z_{n}^{m}(\Rho ,\phi) =R_{n}^{m}(\Rho)\, \cos(m\,\phi)\!}

i nieparzyste wielomiany Zernike ’ a jako
z n − m ( ρ , ϕ ) = R n m ( ρ ) sin ( m ϕ ) , {\displaystyle Z_{n}^{-m}(\Rho ,\phi )=R_{n}^{m}(\Rho )\,\sin(m\,\phi ),\!}

gdzie M I n są liczbami całkowitymi N ≥ m {\displaystyle n \ geq m}

, Φ jest kątem azymutalnym w radianach, a ρ jest znormalizowaną odległością radialną. Wielomiany promieniowe R n m {\displaystyle R_{n}^{m}}

nie mają zależności azymutalnej i są zdefiniowane jako R n m ( ρ ) = ∑ k = 0 ( n − m ) / 2 ( − 1 ) k ( n − k ) ! k ! ((n + m) / 2-k)! ((n-m) / 2-k)! ρ n-2 k jeśli N − M jest parzyste {\displaystyle R_{n}^{m} (\rho )=\!\sum _{k=0}^{(n-m)/2}\!\!\!{\frac {(-1)^{k}\, (n-k)!{k!\,((n+m)/2-k)!\,((n-m)/2-k)!}}\; \rho ^{n-2\, k} \ quad {\MBOX {if}} n-m{\mbox {jest parzyste}}}

and R n m (ρ) = 0 {\displaystyle R_{n}^{m} (\rho )=0}

jeśli n − m {\displaystyle n-m}

jest nieparzyste.
kilka pierwszych wielomianów Zernike ’ a, pomnożonych przez ich odpowiednie współczynniki dopasowania, to:
a 0 × 1 {\displaystyle a_{0}\times 1}
 |
„tłoka”, równa średniej wartości fali |
a 1 × ρ cos (ϕ) {\displaystyle a_{1} \ times \Rho \cos (\phi )}
 |
„x-Tilt”, odchylenie całkowitej wiązki w kierunku strzałkowym |
a 2 × ρ sin (ϕ) {\displaystyle a_{2} \times \ Rho \sin (\phi )}
 |
„y-Tilt”, odchylenie całkowitej wiązki w kierunku stycznym |
a 3 × (2 ρ 2-1) {\displaystyle a_{3} \ times (2\rho ^{2}-1)}
 |
„Defocus”, paraboliczną falą wynikającą z braku ostrości |
a 4 × ρ 2 cos (2 ϕ ) {\displaystyle a_{4}\times \Rho ^{2}\cos(2\phi )}
 |
„0° astygmatyzm”, Cylindryczny kształt wzdłuż osi X lub Y |
a 5 × ρ 2 sin (2 ϕ) {\displaystyle a_{5} \times \ Rho ^{2}\sin (2 \ phi )}
 |
„45° astygmatyzm”, Cylindryczny kształt zorientowany w ±45° od osi X |
a 6 × ( 3 ρ 2 − 2 ) ρ cos ( ϕ ) {\displaystyle a_{6}\times (3\rho ^{2}-2)\Rho \cos (\phi )}
 |
„x-Coma”, obraz komatyczny rozszerzający się w kierunku poziomym |
a 7 × ( 3 ρ 2 − 2 ) ρ sin ( ϕ ) {\displaystyle a_{7} \ times (3\Rho ^{2}-2)\rho \sin(\phi )}
 |
„y-Coma”, comatic image flaring in the vertical direction |
a 8 × (6 ρ 4 – 6 ρ 2 + 1) {\displaystyle a_{8} \ times (6\Rho ^{4}-6\rho ^{2}+1)}
 |
„aberracja sferyczna trzeciego rzędu” |
gdzie ρ {\displaystyle \rho }

jest znormalizowanym promieniem źrenicy z 0 ≤ ρ ≤ 1 {\displaystyle 0 \ leq \ Rho \leq 1}

, ϕ {\displaystyle \phi }

to kąt azymutalny wokół źrenicy z 0 ≤ ϕ ≤ 2 π {\displaystyle 0\leq \phi \leq 2\pi }

, oraz współczynniki dopasowania a 0 , … , a 8 {\displaystyle a_{0},\ldots ,a_{8}}

są błędami fali w długościach fal.
podobnie jak w syntezie Fouriera z wykorzystaniem sinusów i cosinusów, falowy wierzchołek może być doskonale reprezentowany przez wystarczająco dużą liczbę wielomianów Zernikego wyższego rzędu. Jednak fale o bardzo stromych gradientach lub bardzo wysokiej strukturze częstotliwości przestrzennej, takie jak wytwarzane przez propagację przez turbulencje atmosferyczne lub aerodynamiczne pola przepływu, nie są dobrze modelowane przez Wielomiany Zernikego, które mają tendencję do drobnej definicji przestrzennej filtra dolnoprzepustowego w przedniej części fali. W tym przypadku Inne metody dopasowania, takie jak fraktale lub rozkład wartości pojedynczej, mogą przynieść lepsze wyniki dopasowania.
wielomiany okrężne zostały wprowadzone przez Fritsa Zernike ’ a do oceny obrazu punktowego nieprawidłowego układu optycznego z uwzględnieniem efektów dyfrakcji. Doskonały obraz punktowy w obecności dyfrakcji został opisany przez Airy ’ ego już w 1835 roku. Zajęło prawie sto lat, aby dojść do kompleksowej teorii i modelowania obrazu punktowego systemów aberracji (Zernike i Nijboer). Analiza Nijboera i Zernike ’ a opisuje rozkład intensywności zbliżony do optymalnej płaszczyzny ogniskowej. Niedawno opracowano rozszerzoną teorię, która umożliwia obliczanie amplitudy i intensywności obrazu punktowego na znacznie większej objętości w obszarze ogniskowym (Rozszerzona teoria Nijboera-Zernike ’ a). Ta Rozszerzona teoria obrazu punktowego Nijboera-Zernike’ a lub „funkcji rozprzestrzeniania się punktu” znalazła zastosowanie w ogólnych badaniach nad tworzeniem obrazu, szczególnie w systemach o wysokiej aperturze numerycznej oraz w charakteryzowaniu systemów optycznych w odniesieniu do ich aberracji.