wszystkie paradygmaty są wykonywane za pomocą Shuttleboxa
Med Associates, Inc.
unikanie
aktywne unikanie
aktywne unikanie jest tym, co zwykle uważa się za uczenie się unikania. Ze względu na różne skojarzenia, które mogą być tworzone przez mysz podczas uczenia się unikania, uważa się, że dotyczy to zarówno klasycznych, jak i operantowych procesów warunkowania (najbardziej znany z dwuskładnikowej teorii uczenia Hobarta Mowrera).
Branchi & Ricceri (2013)
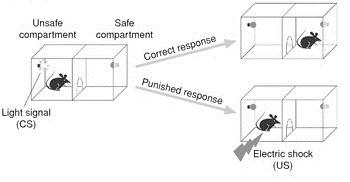
aktywne paradygmaty unikania wymagają, aby mysz nauczyła się unikać awersyjnego bodźca (szoku) poprzez inicjowanie zachowania (poruszania się). Mysz umieszczona jest w jednej z dwóch komór shuttleboxa. Są one narażone na uwarunkowany bodziec (światło, dźwięk itp.), a następnie dostawa wstrząsu stóp (bodziec bezwarunkowy). Bezpośrednio po tej fazie narażenia mogą pojawić się dwa rodzaje reakcji: Reakcja uwarunkowana (uczenie się unikania) i reakcja bezwarunkowa (uczenie się ucieczki) – często reakcje ucieczki poprzedzają pojawienie się reakcji unikania. Unikanie charakteryzuje się reagowaniem, gdy mysz aktywnie unika nadchodzącego wstrząsu, przesuwając się do przeciwnej komory po przedstawieniu CS. Escape charakteryzuje się reagowaniem, gdy mysz nie reaguje na CS, ale reaguje na USA, uciekając do przeciwnego przedziału.
Branchi & Ricceri (2013)
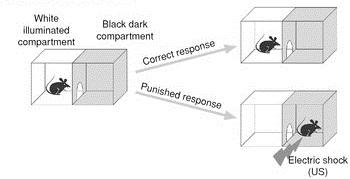
paradygmaty pasywnego unikania wymagają od myszy tłumienia (wrodzonego) zachowania, aby uniknąć awersyjnego bodźca (szoku). Shuttlebox jest tak ułożony, że jedna komora jest „ciemna” (dzięki zastosowaniu nieprzezroczystych ścian lub zewnętrznej pokrywy), a jedna „jasna.”Myszy mają wrodzoną tendencję do preferowania ciemnych obszarów nad jasnymi, więc ich naturalnym instynktem będzie poruszanie się, przez drzwi łączące, z przedziału świetlnego, w którym są umieszczone, do ciemnego przedziału. Podczas akwizycji to wrodzone zachowanie powoduje zamknięcie drzwi łączących i awersyjny wstrząs dostarczany do myszy w ciemnym przedziale. Dlatego mysz powinna dowiedzieć się, że przejście do ciemnego przedziału ma negatywne konsekwencje. Podczas fazy testowej mysz jest ponownie umieszczana w przedziale świetlnym i monitorowana. Pasywne unikanie jest oceniane jako tłumienie (wrodzonego) zachowania przechodzenia do ciemnej Komory. W związku z tym mierzy się opóźnienie wejścia do ciemnej Komory (jeśli mysz w ogóle to robi). Miara ta jest skorelowana z pamięcią.
Ucieczka
uwarunkowanie ucieczki występuje, gdy zwierzę uczy się wykonywać działanie operatywne, aby zakończyć awersyjne zdarzenie lub bodziec. W shuttleboxie ma to miejsce, gdy mysz nauczy się uciekać (tj. poruszać się do) przeciwległej komory po otrzymaniu uderzenia w bieżącą komorę. Jest to klasyczny przykład wzmocnienia negatywnego.
wyuczona bezradność
wyuczona bezradność występuje, gdy mysz została narażona na nieuniknione awersyjne zdarzenie lub bodziec. Za pomocą shuttleboxa mysz jest umieszczana w jednej komorze z zamkniętymi drzwiami do przeciwległej Komory. Następnie mysz otrzymuje szok nożny i nie może z niego uciec. Po kilku prezentacjach w tych okolicznościach, mysz ma trudności z nauczeniem się unikać lub uciec footshock nawet wtedy, gdy jest w stanie to zrobić. Po nieuniknionym przedstawieniu bodźców awersyjnych (wstrząsów stóp) mysz dowiaduje się, że nie ma kontroli nad tymi prezentacjami (ani nad swoim otoczeniem). Prowadzi to do uogólnionego bezradnego zachowania (wyuczonej bezradności), które utrzymuje się nawet wtedy, gdy środowisko/nieprzewidziane zmiany tak, że bodźce awersyjne nie są już nieuniknione. Wyuczona bezradność jest zachowaniem związanym z depresją u ludzi i pod jej wpływem.