într-un sistem optic perfect în teoria clasică a opticii, razele de lumină care provin din orice punct obiect se unesc într-un punct imagine; și, prin urmare, spațiul obiect este reprodus într-un spațiu imagine. Introducerea unor termeni auxiliari simpli, datorită lui Gauss, numiți distanțele focale și planurile focale, permite determinarea imaginii oricărui obiect pentru orice sistem. Cu toate acestea, teoria Gaussiană este adevărată numai atâta timp cât unghiurile realizate de toate razele cu axa optică (axa simetrică a sistemului) sunt infinit de mici, adică cu obiecte infinitezimale, imagini și lentile; în practică, aceste condiții pot să nu fie realizate, iar imaginile proiectate de sisteme necorectate sunt, în general, prost definite și adesea neclare dacă diafragma sau câmpul vizual depășește anumite limite.
investigațiile lui James Clerk Maxwell și Ernst Abbe au arătat că proprietățile acestor reproduceri, adică. poziția relativă și magnitudinea imaginilor nu sunt proprietăți speciale ale sistemelor optice, ci consecințe necesare ale presupunerii (per Abbe) a reproducerii tuturor punctelor unui spațiu în punctele de imagine și sunt independente de modul în care se efectuează reproducerea. Acești autori au arătat, totuși, că niciun sistem optic nu poate justifica aceste presupuneri, deoarece acestea sunt contradictorii legilor fundamentale ale reflecției și refracției. În consecință, teoria Gaussiană furnizează doar o metodă convenabilă de aproximare a realității; sistemele optice realiste nu se încadrează în acest ideal de neatins. În prezent, tot ceea ce poate fi realizat este proiecția unui singur plan pe un alt plan; dar chiar și în acest sens, aberațiile apar întotdeauna și este puțin probabil ca acestea să fie vreodată corectate în întregime.
aberația punctelor axiale (aberația sferică în sens restrâns)Edit

fie S (fig. 1) Fie orice sistem optic, razele care provin dintr-un punct de axă O sub un unghi u1 se vor uni în punctul axei O ‘ 1; și cei sub un unghi u2 în punctul axei O ‘ 2. Dacă există refracție la o suprafață sferică colectivă sau printr-o lentilă pozitivă subțire, O’2 va sta în fața O’1 atât timp cât unghiul u2 este mai mare decât u1 (sub corecție); și invers cu o suprafață sau lentile dispersive (peste corecție). Causticul, în primul caz, seamănă cu semnul > (mai mare decât); în al doilea < (mai mic decât). Dacă unghiul u1 este foarte mic, O ‘1 este imaginea gaussiană; și O’1 O’2 se numește aberație longitudinală, iar O’ 1R aberația laterală a creioanelor cu deschidere u2. Dacă creionul cu unghiul u2 este cel al aberației maxime a tuturor creioanelor transmise, atunci într-un plan perpendicular pe axa de la O’1 există un disc circular de confuzie de rază O’1R, iar într-un plan paralel la O’ 2 altul de rază o ‘ 2R2; între aceste două se află discul cu cea mai mică confuzie.
cea mai mare deschidere a creioanelor, care participă la reproducerea O, adică unghiul u, este în general determinată de marginea unuia dintre lentile sau de o gaură dintr-o placă subțire plasată între, înainte sau în spatele lentilelor sistemului. Această gaură este denumită oprire sau diafragmă; Abbe a folosit termenul de oprire a diafragmei atât pentru gaură, cât și pentru marginea limitativă a obiectivului. Componenta S1 a sistemului, situată între opritorul diafragmei și obiectul o, proiectează o imagine a diafragmei, denumită de Abbe pupila de intrare; pupila de ieșire este imaginea formată de componenta S2, care este plasată în spatele opritorului diafragmei. Toate razele care emit de la O și trec prin opritorul diafragmei trec și prin pupilele de intrare și ieșire, deoarece acestea sunt imagini ale opritorului diafragmei. Deoarece diafragma maximă a creioanelor emise din O este unghiul u subtendat de pupila de intrare în acest moment, magnitudinea aberației va fi determinată de poziția și diametrul pupilei de intrare. Dacă sistemul este în întregime în spatele opritorului de deschidere, atunci acesta este el însuși pupila de intrare (oprire frontală); dacă este în întregime în față, este pupila de ieșire (oprire din spate).
dacă punctul obiect este infinit de îndepărtat, toate razele primite de primul membru al sistemului sunt paralele, iar intersecțiile lor, după traversarea sistemului, variază în funcție de înălțimea lor perpendiculară de incidență, adică distanța lor față de axă. Această distanță înlocuiește unghiul u în considerațiile precedente; iar diafragma, adică raza pupilei de intrare, este valoarea sa maximă.
aberația elementelor, adică cele mai mici obiecte în unghi drept față de axăedit
dacă razele emise de O (fig. 1) sunt concurente, nu rezultă că punctele dintr-o porțiune a unui plan perpendicular la o la axă vor fi, de asemenea, concurente, chiar dacă partea planului este foarte mică. Pe măsură ce diametrul lentilei crește (adică, odată cu creșterea diafragmei), punctul vecin N va fi reprodus, dar la care participă aberații comparabile ca mărime cu ON. Aceste aberații sunt evitate dacă, conform Abbe, condiția sinusoidală, sin u’1 / sin u1=sin u’2 / sin u2, este valabilă pentru toate razele care reproduc punctul O. Dacă punctul obiect O este infinit de îndepărtat, u1 și u2 trebuie înlocuite cu h1 și h2, înălțimile perpendiculare ale incidenței; condiția sinusoidală devine apoi sin u’1/h1=sin u’2/h2. Un sistem care îndeplinește această condiție și fără aberații sferice se numește aplanatic (greacă a-, privativ, plann, a rătăcire). Acest cuvânt a fost folosit pentru prima dată de Robert Blair pentru a caracteriza un achromatism superior și, ulterior, de mulți scriitori pentru a denota și libertatea de aberația sferică.
deoarece aberația crește odată cu distanța razei de centrul lentilei, aberația crește odată cu creșterea diametrului lentilei (sau, în mod corespunzător, cu diametrul diafragmei) și, prin urmare, poate fi minimizată prin reducerea diafragmei, cu prețul reducerii cantității de lumină care ajunge în planul imaginii.
aberația punctelor laterale ale obiectului (puncte dincolo de axă) cu creioane înguste — astigmatismEdit

un punct O (fig. 2) la o distanță finită de axă (sau cu un obiect infinit de îndepărtat, un punct care subtinde un unghi finit la sistem) este, în general, chiar și atunci nu este reprodus brusc dacă creionul de raze care iese din el și traversează sistemul este făcut infinit îngust prin reducerea opririi diafragmei; un astfel de creion constă din razele care pot trece din punctul obiectului prin pupila de intrare acum infinit de mică. Se vede (ignorând cazurile excepționale) că creionul nu îndeplinește suprafața refractară sau reflectantă în unghi drept; prin urmare, este astigmatic (Gr. A -, privativ, stigmia, un punct). Denumind raza centrală care trece prin pupila de intrare axa creionului sau a razei principale, se poate spune: razele creionului se intersectează, nu într-un punct, ci în două linii focale, care se poate presupune că sunt în unghi drept față de raza principală; dintre acestea, unul se află în planul care conține raza principală și axa sistemului, adică. în prima secțiune principală sau secțiune meridională, iar cealaltă în unghi drept față de aceasta, adică în a doua secțiune principală sau secțiune sagitală. Prin urmare, nu primim într-un singur plan de interceptare în spatele sistemului, cum ar fi, de exemplu, un ecran de focalizare, o imagine a punctului obiectului; pe de altă parte, în fiecare dintre cele două planuri se formează separat liniile O’ și O” (în planurile vecine se formează elipse), iar într-un plan între O’ și O” un cerc de cea mai mică confuzie. Intervalul O ‘O”, denumit diferența astigmatică, crește, în general, cu unghiul W realizat de raza principală OP cu axa sistemului, adică cu câmpul vizual. Două suprafețe de imagine astigmatice corespund unui plan obiect; și acestea sunt în contact la punctul Axei; pe una se află liniile focale de primul fel, pe celelalte cele ale celui de-al doilea. Sistemele în care cele două suprafețe astigmatice coincid sunt denumite anastigmatice sau stigmatice.
Sir Isaac Newton a fost probabil descoperitorul astigmatizării; poziția liniilor de imagine astigmatice a fost determinată de Thomas Young; iar teoria a fost dezvoltată de Allvar Gullstrand. O bibliografie de P. Culmann este dată în Moritz von Rohr Bilderzeugung în optischen Instrumenten.
aberația punctelor obiectului lateral cu creioane largi — comaEdit
prin deschiderea opritorului mai larg, apar abateri similare pentru punctele laterale așa cum au fost deja discutate pentru punctele axiale; dar în acest caz sunt mult mai complicate. Cursul razelor din secțiunea meridională nu mai este simetric cu raza principală a creionului; și pe un plan de interceptare apare, în locul unui punct luminos, un petic de lumină, care nu este simetric în jurul unui punct și care prezintă adesea o asemănare cu o cometă având coada îndreptată spre sau departe de axă. Din această apariție își ia numele. Forma nesimetrică a creionului meridional—anterior singurul considerat—este comă doar în sens mai restrâns; alte erori de comă au fost tratate de Arthur K Unktifnig și Moritz von Rohr, iar mai târziu de Allvar Gullstrand.
curbura câmpului imageEdit
dacă erorile de mai sus sunt eliminate, cele două suprafețe astigmatice se unesc și o imagine ascuțită obținută cu o deschidere largă—rămâne necesitatea corectării curburii suprafeței imaginii, mai ales atunci când imaginea urmează să fie recepționată pe o suprafață plană, de exemplu în fotografie. În cele mai multe cazuri, suprafața este concavă față de sistem.
distorsiunea imaginiimodificare

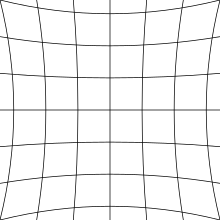
chiar dacă imaginea este ascuțită, aceasta poate fi distorsionată în comparație cu proiecția ideală a orificiului. În proiecția pinhole, Mărirea unui obiect este invers proporțională cu distanța sa față de cameră de-a lungul axei optice, astfel încât o cameră îndreptată direct spre o suprafață plană reproduce acea suprafață plană. Distorsiunea poate fi considerată ca întinzând imaginea neuniform sau, echivalent, ca o variație a măririi pe câmp. În timp ce” distorsiunea „poate include deformarea arbitrară a unei imagini, cele mai pronunțate moduri de distorsiune produse de optica imagistică convențională sunt” distorsiunea barilului”, în care centrul imaginii este mărit mai mult decât perimetrul (figura 3a). Reversul, în care perimetrul este mărit mai mult decât centrul, este cunoscut sub numele de „distorsiune pincushion” (figura 3b). Acest efect se numește Distorsiune a obiectivului sau distorsiune a imaginii și există algoritmi pentru corectarea acestuia.
sistemele fără distorsiuni sunt numite ortoscopice (orthos, right, skopein to look) sau rectilinii (linii drepte).

această aberație este destul de distinctă de cea a clarității reproducerii; în reproducerea neclară, problema distorsiunii apare dacă numai părți ale obiectului pot fi recunoscute în figură. Dacă, într-o imagine neclară, un petic de lumină corespunde unui punct obiect, Centrul de greutate al plasturelui poate fi considerat ca punct de imagine, acesta fiind punctul în care planul care primește imaginea, de exemplu, un ecran de focalizare, intersectează raza care trece prin mijlocul opritorului. Această ipoteză este justificată dacă o imagine slabă pe ecranul de focalizare rămâne staționară atunci când diafragma este diminuată; în practică, acest lucru se întâmplă în general. Această rază, numită de Abbe o rază principală (care nu trebuie confundată cu razele principale ale teoriei gaussiene), trece prin centrul pupilei de intrare înainte de prima refracție și centrul pupilei de ieșire după ultima refracție. Din aceasta rezultă că corectitudinea desenului depinde numai de razele principale; și este independent de claritatea sau curbura câmpului imaginii. Referindu-se la fig. 4, avem O ‘ Q ‘/oq = a’ tan w’/A tan w = 1/N, unde N este scara sau mărirea imaginii. Pentru ca N să fie constant pentru toate valorile lui w, un’ tan w’ / un tan w trebuie să fie, de asemenea, constant. Dacă raportul a’ / A să fie suficient de constant, așa cum se întâmplă adesea, relația de mai sus se reduce la starea aerisită, adică tan w’/ tan w= o constantă. Această relație simplă (vezi Camb. Phil. Trans., 1830, 3, p. 1) este îndeplinită în toate sistemele care sunt simetrice în raport cu diafragma lor (denumite pe scurt obiective simetrice sau holosimetrice) sau care constau din două componente asemănătoare, dar de dimensiuni diferite, plasate de diafragmă în raportul dimensiunii lor și prezentând aceeași curbură (obiective hemisimetrice); în aceste sisteme tan w’ / tan w = 1.
Constanța lui a’/A necesară pentru ca această relație să se mențină a fost subliniată de R. H. Bow (Brit. Journ. Fotog., 1861) și Thomas Sutton (Note fotografice, 1862); a fost tratat de O. Lummer și de M. von Rohr (Zeit. F. Instrumentenk., 1897, 17 și 1898, 18, p. 4). Este nevoie ca mijlocul opritorului de deschidere să fie reprodus în centrele elevilor de intrare și ieșire fără aberații sferice. M. von Rohr a arătat că pentru sistemele care nu îndeplinesc nici condiția Airy, nici Bow-Sutton, raportul a’ cos w’/A tan w va fi constant pentru o distanță a obiectului. Această condiție combinată este îndeplinită exact de obiectivele holosimetrice care se reproduc cu scara 1 și de hemisimetrice, dacă scara de reproducere este egală cu raportul dintre dimensiunile celor două componente.
Modelul Zernike al aberațiiloredit
profilurile circulare ale frontului de undă asociate aberațiilor pot fi modelate matematic folosind polinoame Zernike. Dezvoltat de Frits Zernike în anii 1930, polinoamele lui Zernike sunt ortogonale pe un cerc de rază unitară. Un profil complex, aberant al Frontului de undă poate fi echipat cu polinoame Zernike pentru a obține un set de coeficienți de montare care reprezintă individual diferite tipuri de aberații. Acești coeficienți Zernike sunt liniar independenți, astfel contribuțiile individuale de aberație la un front de undă global pot fi izolate și cuantificate separat.
există polinoame Zernike pare și impare. Polinoamele even Zernike sunt definite ca
Z N m ( 0 , opt ) = R n m ( opt ) cos (opt ) {\displaystyle z_{n}^{m} (\rho ,\phi )=R_{n}^{m} (\rho )\,\cos (opt)\!}

și polinoamele Zernike impare ca
Z n − M ( 0 , opt ) = R n m ( opt ) sin ( opt) sin (opt), {\displaystyle Z_{n}^{-m} (\rho ,\phi) =R_{n}^{m} (\rho)\, \sin (opt),\!}

unde m și n sunt numere întregi nenegative cu n m {\displaystyle n \ geq m}

, XlX este unghiul azimutal în radiani, iar XlX este distanța radială normalizată. Polinoamele radiale R n m {\displaystyle R_{n}^{m}}

nu au dependență azimutală, și sunt definite ca r n m ( inqc) = inqc k = 0 ( n − m ) / 2 ( − 1 ) k ( n − k ) ! k ! ((n + m) / 2-k)! ((n − m ) / 2-k)! N-2 k dacă n – m este egal {\displaystyle R_{n}^{m}(\rho)=\!\sum _ {k=0}^{(n-m) / 2}\!\!\!{\frac {(-1)^{k}\, (n-k)!{k!\, ((n+m)/2-k)!\, ((n-m)/2-k)!}}\; \ rho ^{n-2\, k}\quad {\mbox{dacă }}n-m {\mbox{ este chiar}}}

și R N m ( 0 {\displaystyle R_{n}^{m} (\rho )=0}

dacă n − m {\displaystyle n-m}

este impar.
primele câteva polinoame Zernike, înmulțite cu coeficienții lor de potrivire respectivi, sunt:
o 0 × 1 {\displaystyle a_{0}\times 1}
 |
„Piston”, egală cu valoarea medie a frontului de undă |
1 × ρ cos ( ϕ ) {\displaystyle a_{1}\ori \rho \cos(\phi )}
 |
„X-Tilt”, abaterea de ansamblu grindă în direcția sagital |
2 × ρ sin ( ϕ ) {\displaystyle a_{2}\ori \rho \sin(\phi )}
 |
„y-Tilt”, abaterea fasciculului global în direcția tangențială |
a 3 ( 2) (2 − 1) {\displaystyle a_{3}\ori (2 \ rho ^{2}-1)}
 |
„Defocus” , un front de undă parabolic care rezultă din faptul că nu este focalizat |
a 4-x 2-x 2-x-x {\displaystyle a_{4}\times \Rho ^{2}\x-x ( 2\phi )}
 |
„0° Astigmatism”, o formă cilindrică de-a lungul axei X sau Y |
un 5 2 sin ( 2 ) {\displaystyle a_{5} \ times \ rho ^{2} \ sin (2 \ phi )}
 |
„45° Astigmatism”, de forma cilindrica orientata la 45 de centimetrii de la axa x |
a 6 ( 3 ) 2 − 2) (3) (3) (3) (3) (3) (3) (3) (3) (3) (2) (2) (3) (2) (3))}
 |
„x-Coma”, imagine comatică evazată în direcția orizontală |
a 7 − a ( 3-A 2-A) – A 7-a ( 3-A 2-A) – A (7) – a {\displaystyle a_{7}\times (3 \ rho ^{2}-2)\rho \ sin (\phi )}
 |
„y-Coma”, imagine comatică evazată în direcția verticală |
a 8 ( 6 4 − 6 4 + 1 ) {\displaystyle a_{8}\ori (6\rho ^{4}-6 \ rho ^{2}+1)}
 |
„aberație sferică de ordinul al treilea” |
în cazul în care {\displaystyle \ rho }

este raza normalizată a pupilei cu 0,1 {\displaystyle 0\leq \Rho \leq 1}

, XV {\displaystyle \phi }

este unghiul azimutal din jurul pupilei cu 0 int 2 Int {\displaystyle 0\leq \Phi \LEQ 2\pi }

și coeficienții de montare a 0,…, a 8 {\displaystyle a_{0},\ldots, a_{8}}

sunt erorile frontului de undă în lungimi de undă.
ca și în sinteza Fourier folosind sinus și cosinus, un front de undă poate fi perfect reprezentat de un număr suficient de mare de polinoame Zernike de ordin superior. Cu toate acestea, Fronturile de undă cu gradienți foarte abrupți sau structură de frecvență spațială foarte ridicată, cum ar fi produse prin propagare prin turbulență atmosferică sau câmpuri de flux aerodinamice, nu sunt bine modelate de polinoamele Zernike, care tind să filtreze trece-jos definiție spațială fină în frontul de undă. În acest caz, alte metode de montare, cum ar fi fractalii sau descompunerea valorii singulare, pot produce rezultate îmbunătățite de montare.
polinoamele cercului au fost introduse de Frits Zernike pentru a evalua imaginea punctuală a unui sistem optic aberat, ținând cont de efectele difracției. Imaginea punctuală perfectă în prezența difracției fusese deja descrisă de Airy, încă din 1835. A fost nevoie de aproape o sută de ani pentru a ajunge la o teorie și modelare cuprinzătoare a imaginii punctuale a sistemelor aberante (Zernike și Nijboer). Analiza realizată de Nijboer și Zernike descrie distribuția intensității aproape de planul focal optim. O teorie extinsă care permite calcularea amplitudinii și intensității imaginii punctuale pe un volum mult mai mare în regiunea focală a fost recent dezvoltată (teoria extinsă Nijboer-Zernike). Această teorie extinsă Nijboer-Zernike a imaginii punctului sau a formării funcției de răspândire a punctului a găsit aplicații în cercetarea generală privind formarea imaginii, în special pentru sistemele cu o deschidere numerică ridicată și în caracterizarea sistemelor optice în ceea ce privește aberațiile lor.